Attention:
The need of the system has to be announced in cruise planning document "Einsatzplanung" prior to the cruise.
The mounting of USBL antenna is executed by ships crew, the operation of the system must be executed by experienced scientific staff. Mounting of antenna takes ca. 45 minutes: removing ice protection of moon pool and lowering GAPS antenna. The reverse procedure for deinstallation takes the same time.
In case of sea ice conditions the system must be operated with no ship speed but following ROV or drifting is allowed. In ice free conditions moving of ship is allowed up to 5 knots. Opening angle detecting transponders theoretically amounts to 200 degree. But you need to take the obstruction by means of ships hull into account.
In the actual version there is no compatibility to USBL system POSIDONIA (USBL-Box), which is also available on board Polarstern.
Online data stream of GAPS is broadcasted via UDP, which can be used by alternative visualization tools (e.g. PosiView) or for seperately logging.
GAPS underwater communication is conducted by using various frequencies, interferences with simultaneously operating Echo Sounders are possible.
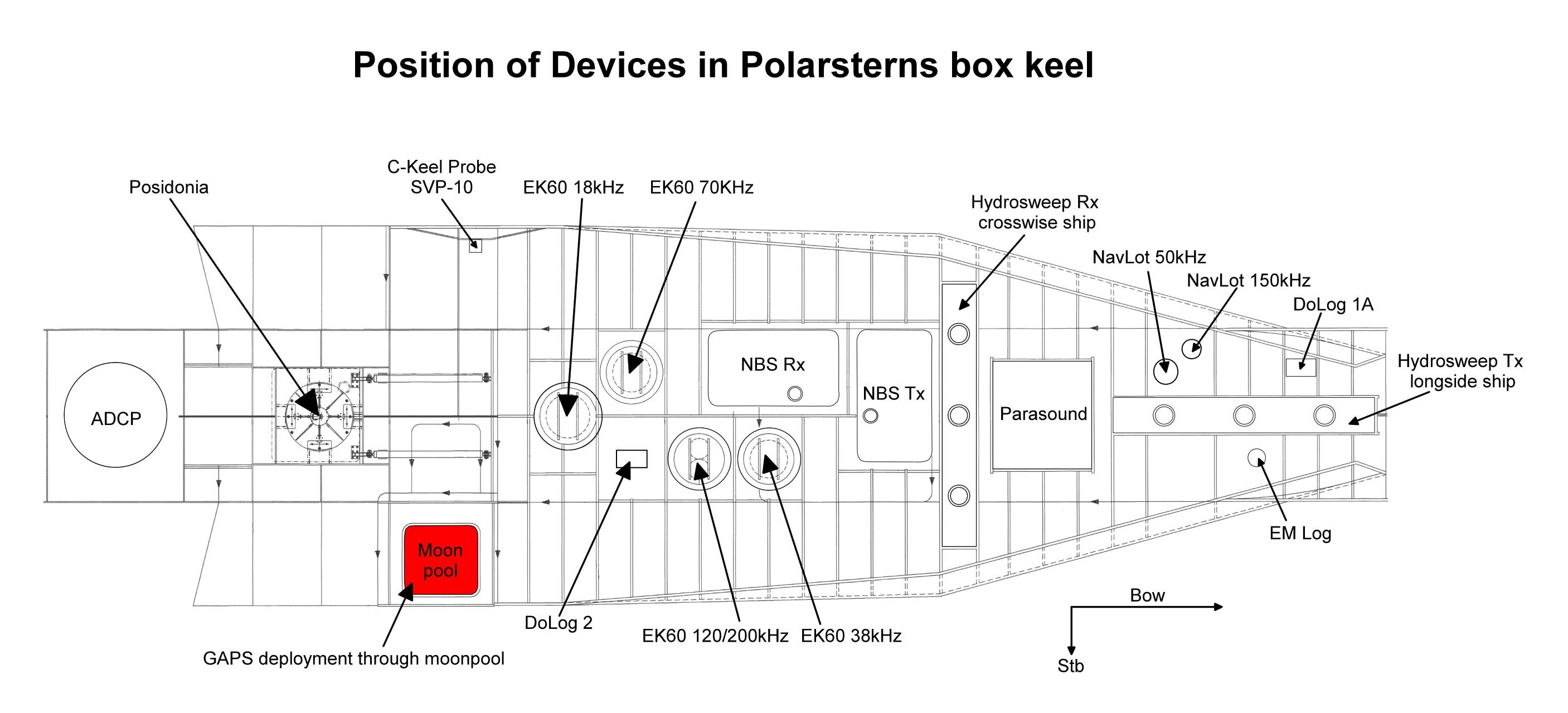
Attention: Submarine cable must be connected and device must be submerged in water through moonpool in box keel before activating GAPS.
Summary
The Global Acoustic Positioning System (GAPS) combines an ultra-short baseline (USBL) acoustic positioning system and an inertial navigation system (INS) in the same housing to provide accurate position of any subsea object supplied with a transponder. Operating range is up to 4000m water depth with accuracy 0.2 percent of the distance to the object. The registration angle of 200 degree also enables position detection nearby sea surface. Electronic device ECB (Easy Connection Box) is installed in echo sounder device room E-525a. Operation is performed by software MMI.
| Manufacturer | iXblue |
|---|---|
| Model | GAPS II |
| Serial No. | 430 9000-129 |
| Type | ultra short baseline positioning systems |
| SENSOR-Link | ↪ |

Transducer Frequency:
Contacts
| Name | Institution | Role |
|---|---|---|
| Ralf Krocker | Alfred Wegener Institute, Helmholtz Centre for Polar and Marine Research | Engineer In Charge, Data Provider |
Components
The system consits of the GAPS itself, mounting for installation in box keel, Easy Connect Box (ECB) and monitoring software "GAPS MMI - Man Machine Interface". Also available on board is one transponder of type MT832E-R and one transponder of type MT832E-HD-R with removable head. The system is hard-wired and the software is installed an configurated. GAPS will typically be installed through moonpool in box keel. The transponders can be mounted to winch wire or to a submarine vehicle. GAPS underwater communication is conducted by using various frequencies, interferences with simultaneously operating Echo Sounders are possible.
GAPS:
GAPS is a bi-directional acoustic positioning system, which communicates between ship (antenna) and one or more transponders. Positions of the transponders are determined relative to the ship or absolute in geographic frame. GAPS must be installed with custom-built mounting through moonpool in box keel and is operated below the ship's hull.
Transponders MT832E-R and MT832E-HD-R:
The acoustic transponders must be mechanically attached to underwater objects or vehicles.
The transponders are synchronized to the GAPS and can be operated in transponder-mode (acoustic transmission and receiving) or in responder-mode (electric transmission and acoustic receiving; cables and plugs for responder-mode are *not available on board). Special mounting for operations of the MT832E-R on winch wire is available, e.g. for determination of exact sampling locations in deep water. The transponders can be operated in water depth up to 3000m. Communication frequency can be selected to be 19.5, 20.0, 20.5 or 21 kHz.
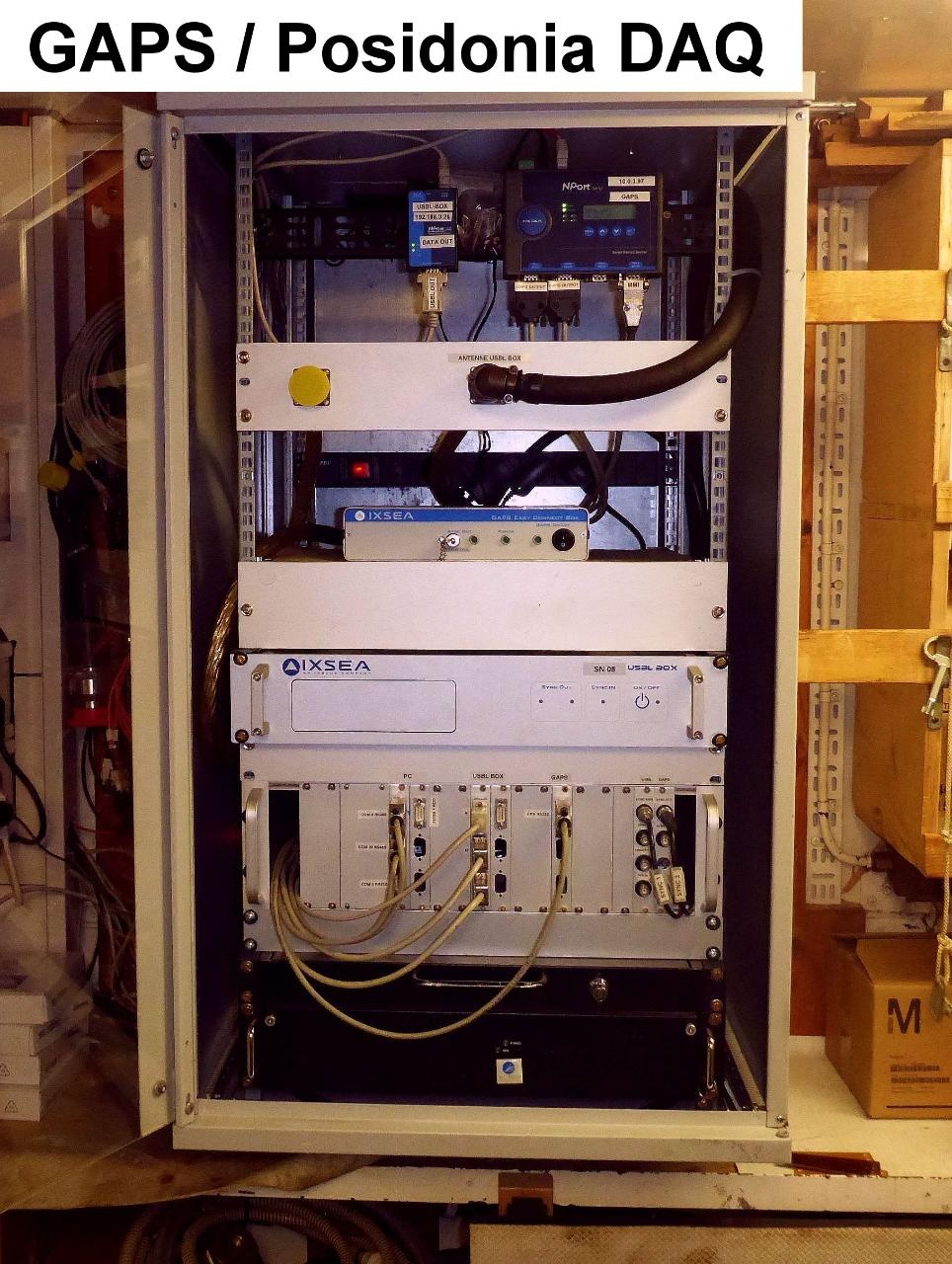
Easy Connect Box (ECB):
ECB is a small interface to connect GAPS, external GPS receiver, PC with MMI-software and data management system DShip. ECB is mounted to the 19" Rack in room E-525a. The rearward switch activates the ECB, the front switch activates the GAPS.
GAPS MMI - Man Machine Interface - Software:
The MMI-Software starts the GAPS and tracks the underwater transponders. The Software is installed on the PC on the bridge and on laptop of laboratory electronics engineer.
External GPS receiver:
On board Polarstern GAPS is connected to the on-board GPS receiver. An external GPS receiver is not necessary on board Polarstern, but it is optional available for other fields of application.
Position
| Info | xyz-position is valid, if device is deployed through moonpool in box keel, electronics located in E525A. |
| X | 69.485 m (X-0 is at the center of der rudder (ref. design drawing of the vessel), positive X-axis is forward and along vessel centerline) |
| Y | -1.658 m (Y-0 at centerline, positive Y-axis is portside) |
| Z | 0.008 m (Z-0 is set to the lowest point of the keel, positive Z-axis is upwards) |
Data logging, storage and archiving
Logged parameters
| Parameter | Sensor Output Type | Unit |
|---|---|---|
| day | date and time | unknown |
| depth | depth | m |
| latitude | latitude | deg |
| longitude | longitude | deg |
| month | date and time | unknown |
| time in hours | date and time | unknown |
| year | date and time | unknown |
| x-coordinate | distance | m |
| y-coordinate | distance | m |
| z-coordinate | distance | m |
| roll | attitude | deg |
| pitch | attitude | deg |
| heading | attitude | deg |
| transponder number | index | unknown |
Central geographical ship's position and time standard
Centering of GPS-antenna position to GAPS and to transponders.
Rawdata storage on board
Dship
Device name |
GAPS |
|---|---|
Parameters |
day; depth [m]; EW; latitude [°]; longitude [°]; month; NS; time in hours; transponder no sag; transponder no sax; x coordinate [m]; y coordinate [m]; year; z coordinare [m]; pitch [deg]; roll [deg]; heading std dev [deg]; pitch std dev [deg]; roll std dev [deg]; altitude std dev; latitude std dev; longitude std dev; heading [deg] |
Data archiving on land
File format(s) |
*.txt |
|---|---|
Calibration certificates |
NO |