Attention:
The need of the system has to be announced in cruise planning document "Einsatzplanung" prior to the cruise.
The mounting of USBL antenna is executed by ships crew, the operation of the system must be executed by experienced scientific staff. Mounting of antenna takes ca. 45 minutes: removing ice protection of moon pool and lowering GAPS antenna. The reverse procedure for deinstallation takes the same time.
In case of sea ice conditions the system must be operated with no ship speed but following ROV or drifting is allowed. In ice free conditions moving of ship is allowed up to 5 knots. Opening angle detecting transponders theoretically amounts to 200 degree. But you need to take the obstruction by means of ships hull into account.
In the actual version there is no compatibility to USBL system POSIDONIA (USBL-Box), which is also available on board Polarstern.
Online data stream of GAPS is broadcasted via UDP, which can be used by alternative visualization tools (e.g. PosiView) or for seperately logging.
GAPS underwater communication is conducted by using various frequencies, interferences with simultaneously operating Echo Sounders are possible.
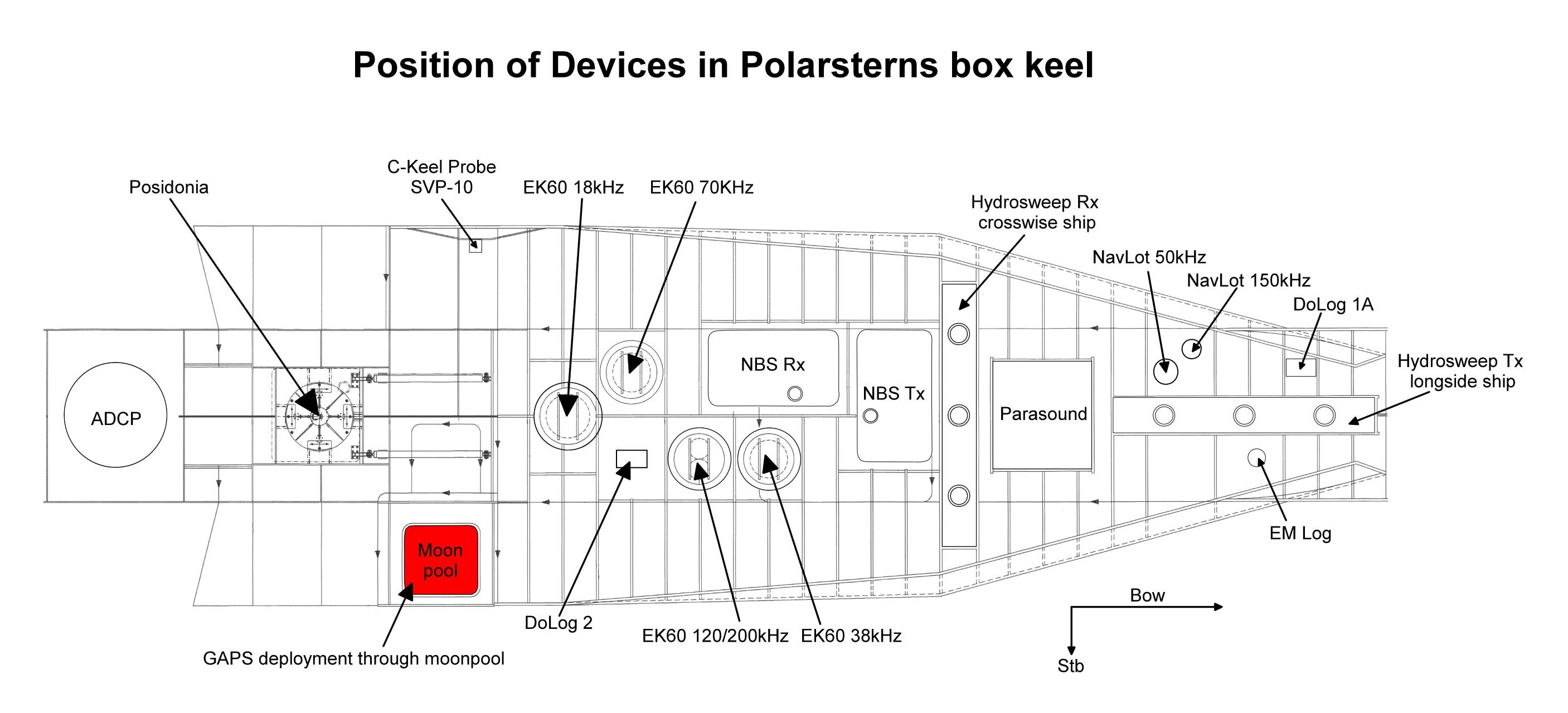
Attention: Submarine cable must be connected and device must be submerged in water through moonpool in box keel before activating GAPS.
Summary
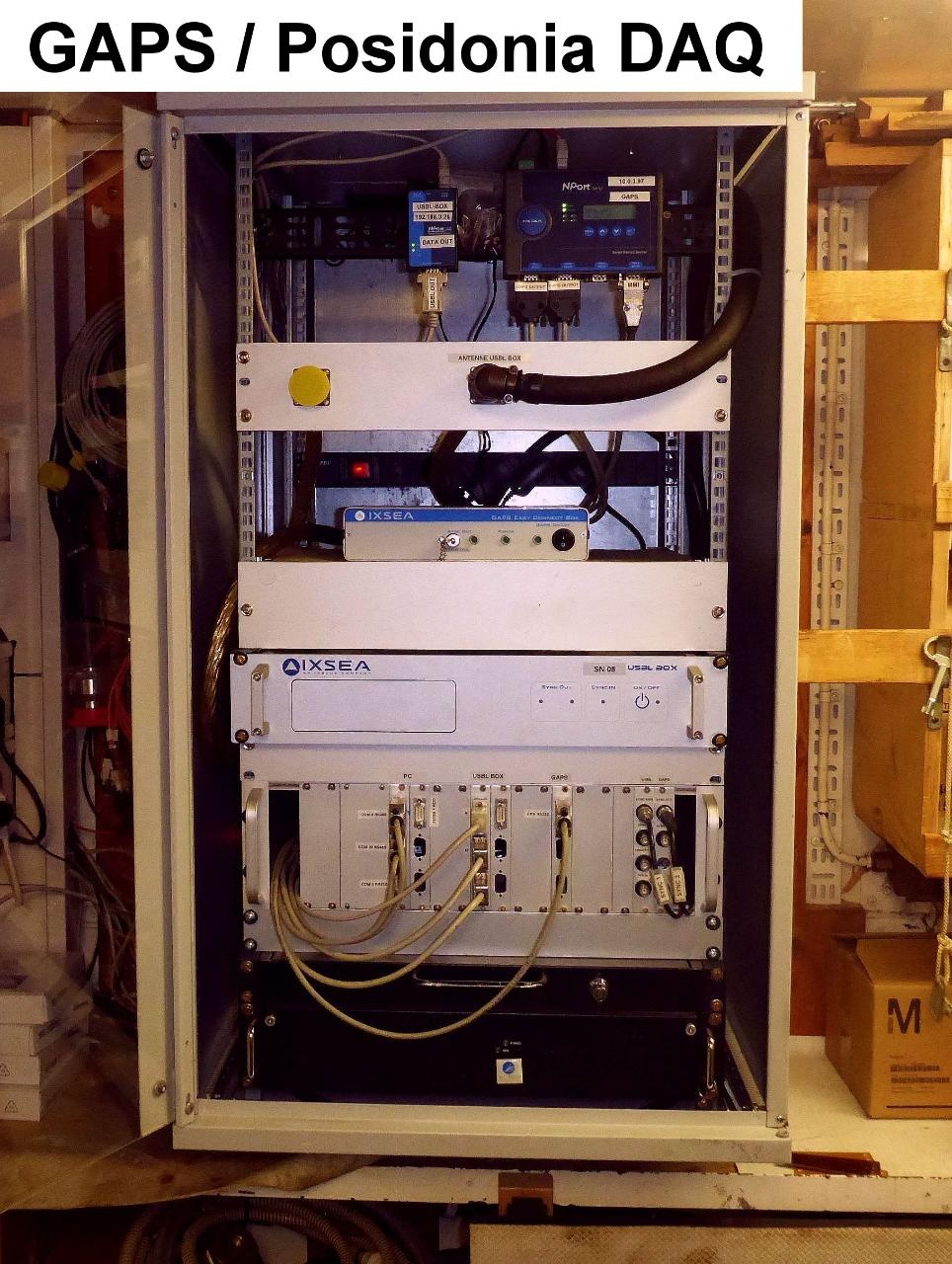
The Global Acoustic Positioning System (GAPS) combines an ultra-short baseline (USBL) acoustic positioning system and an inertial navigation system (INS) in the same housing to provide accurate position of any subsea object supplied with a transponder. Operating range is up to 4000m water depth with accuracy 0.2 percent of the distance to the object. The registration angle of 200 degree also enables position detection nearby sea surface. Electronic device ECB (Easy Connection Box) is installed in echo sounder device room E-525a. Operation is performed by software MMI.
| Manufacturer | iXblue |
|---|---|
| Model | GAPS II |
| Serial No. | 430 9000-129 |
| Type | ultra short baseline positioning systems |
| REGISTRY-Link | ↪ REGISTRY (628) |

Transducer Frequency:
Contacts
| Name | Institution | Role |
|---|---|---|
| Ralf Krocker | Alfred Wegener Institute, Helmholtz Centre for Polar and Marine Research | Engineer In Charge, Data Provider |
Components
Position
| Info | xyz-position is valid, if device is deployed through moonpool in box keel, electronics located in E525A. |
| X | 69.485 m (X-0 is at the center of der rudder (ref. design drawing of the vessel), positive X-axis is forward and along vessel centerline) |
| Y | -1.658 m (Y-0 at centerline, positive Y-axis is portside) |
| Z | 0.008 m (Z-0 is set to the lowest point of the keel, positive Z-axis is upwards) |
Data logging, storage and archiving
Logged parameters
| Parameter | O2ARegistry Output Type | Unit |
|---|---|---|
| day | date and time | unknown |
| depth | depth | m |
| latitude | latitude | deg |
| longitude | longitude | deg |
| month | date and time | unknown |
| time in hours | date and time | unknown |
| year | date and time | unknown |
| x-coordinate | distance | m |
| y-coordinate | distance | m |
| z-coordinate | distance | m |
| roll | attitude | deg |
| pitch | attitude | deg |
| heading | attitude | deg |
| transponder number | index | unknown |