Attention:
The mounting of USBL antenna is executed by ships crew, the operation of the system must be executed by experienced scientific staff. The need of the system has to be announced in cruise planning docment "Einsatzplanung" prior to the cruise.
In case of sea ice conditions the system must be operated with no ship speed but following ROV or drifting is allowed. In free ice conditions moving of ship is allowed up to 5 knots speed using deployable antenna or maximum ship speed using flush antenna or Thomson Marconi antenna. In case of deployable antenna or Thomson Marconi antenna preparation takes ca 45 minutes: removing ice protection of moon pool and lowering antenna. The reverse procedure for deinstallation takes the same time. In case of flush antenna the ice protection window must be opened which takes a few moments.
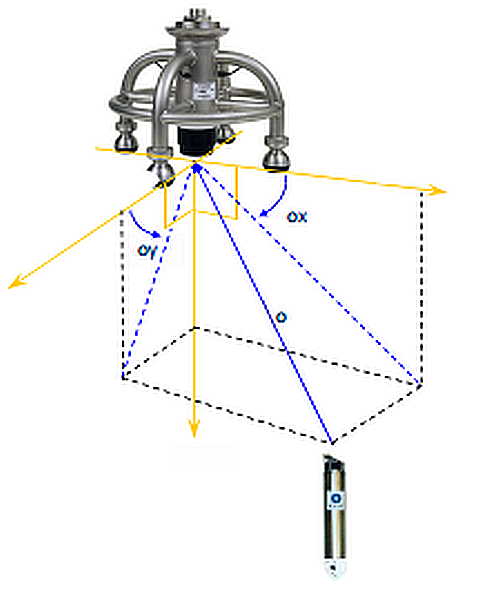
Opening angle for transponder detection amounts to 60 degrees. The detection range amounts to 8000m.
Posidonia system is not compatible with USBL system Global Acoustic Positioning System (GAPS), which is also available on board.
Summary
POSIDONIA II is an ultra-short baseline (USBL) acoustic positioning system for tracking of subsea vehicles.
vessel:polarstern:posidonia (1397)
| Manufacturer | iXblue |
|---|---|
| Model | POSIDONIA II |
| Serial No. | n/a |
| Type | ultra short baseline positioning systems |
Contacts
| Name | Institution | Role |
|---|---|---|
| Ralf Krocker | Alfred-Wegener-Institute for Polar and Marine Research | Engineer In Charge, Data Provider |
Components
For Posidonia system are two transponders of type Oceano ET861 and two releasers of type Oceano RT 861 B1S (RT2500 S-Side Bar) on board available. The maximum depth amounts to 6000m.
System IXSEA TT801 (SN 002) can alternatively be used to send release commands.
Online data stream of Posidonia is broadcasted via UDP, which can be used by alternative visualisation tools (e.g. PosiView) or for seperately logging.
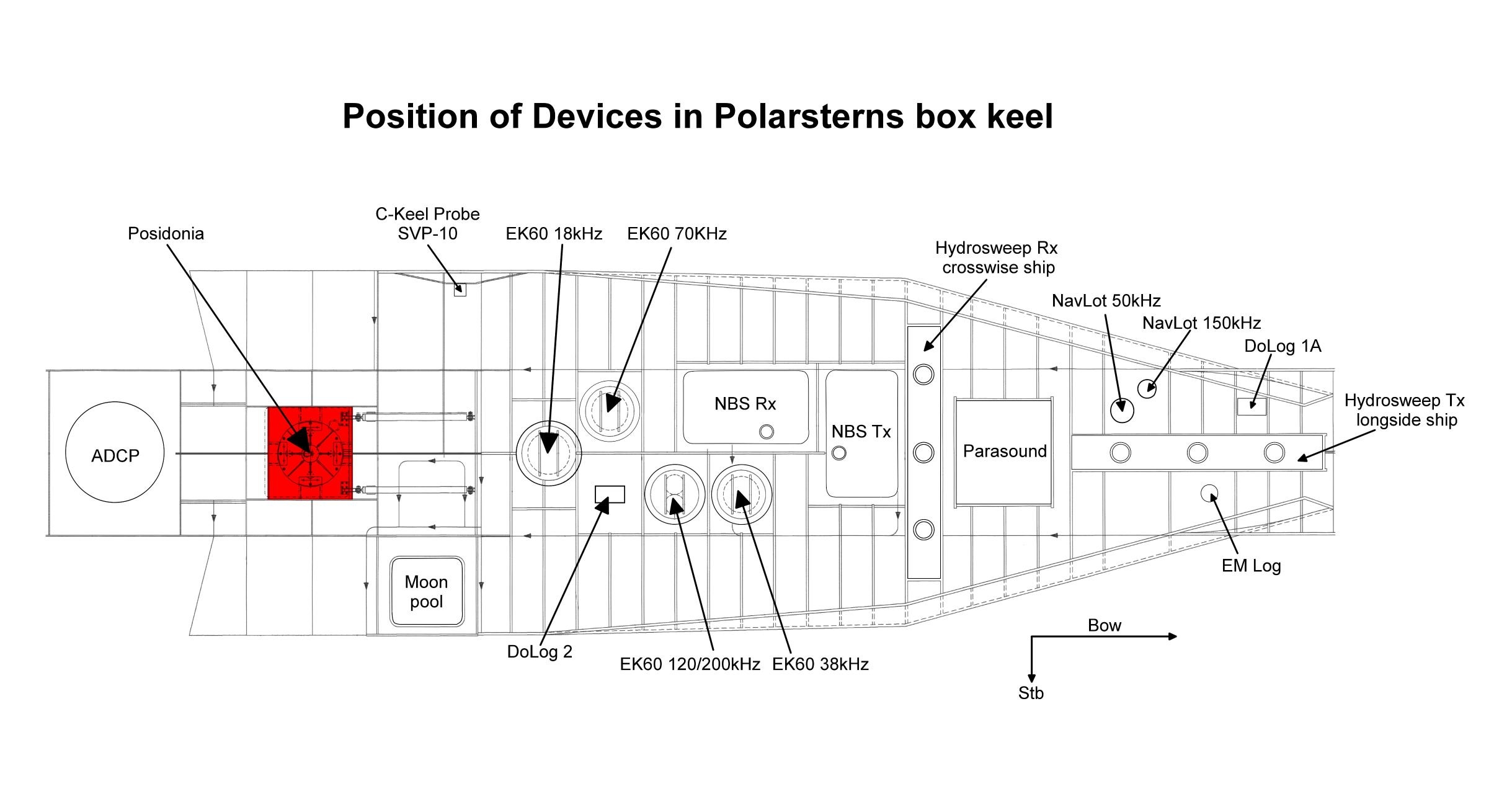
Position
No local frame definition available.
Data logging, storage and archiving
Logged parameters
| Parameter | Sensor Output Type | Unit |
|---|---|---|
| day | date and time | unknown |
| month | date and time | unknown |
| year | date and time | unknown |
| latitude | latitude | degree |
| longitude | longitude | degree |
| raw time | date and time | s |
| x-position | distance | m |
| y-position | distance | m |
| z-position depth | distance | m |
| transponder number | index | unknown |
Central geographical ship's position and time standard
Geographical ship's position and orientation is provided by MRU Ixblue Hydrins.
Rawdata storage on board
Dship
Device name |
POSIDONIA |
|---|---|
Parameters |
day; EW; month; NS; position_latitude [°]; position_longitude [°]; raw_time [secs]; transponder_No; transponder No (rel); x [m]; y [m]; year; z (depth) [m] |
Data archiving on land
File format(s) |
*.txt |
|---|---|
Calibration certificates |
NO |
Documentation
-
POSIDONIA datasheet (Factsheet, 2 MB)
-
POSIDONIA USBL-BOX Positioning System User Guide (User Manual, 10 MB)
-
POSIDONIA Acoustic Antenna User Guide (User Manual, 4 MB)
-
POSIDONIA technical description (Factsheet, 4 MB)
-
POSIDONIA technical drawing I (Factsheet, 246 kB)
-
POSIDONIA technical drawing II (Factsheet, 187 kB)