| Note | ||
|---|---|---|
| ||
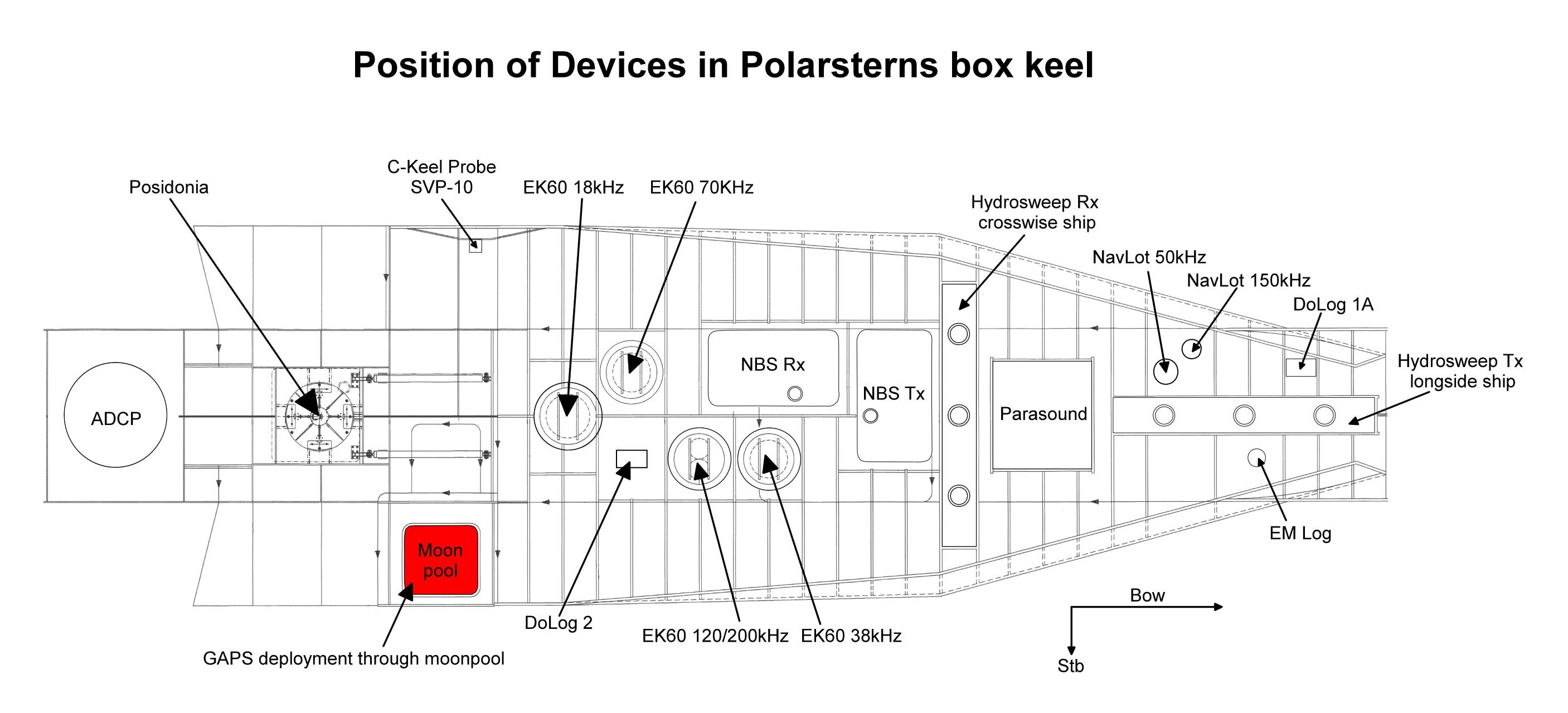
The need of the system has to be announced in cruise planning document "Einsatzplanung" prior to the cruise. The mounting of USBL antenna is executed by ships crew, the operation of the system must be executed by experienced scientific staff. Mounting of antenna takes ca. 45 minutes: removing ice protection of moon pool and lowering GAPS antenna. The reverse procedure for deinstallation takes the same time. In case of sea ice conditions the system must be operated with no ship speed but following ROV or drifting is allowed. In ice free conditions moving of ship is allowed up to 5 knots. Opening angle detecting transponders theoretically amounts to 200 degree. But you need to take the obstruction by means of ships hull into account. In the actual version there is no compatibility to USBL system POSIDONIA (USBL-Box), which is also available on board Polarstern. Online data stream of GAPS is broadcasted via UDP, which can be used by alternative visualization tools (e.g. PosiView) or for seperately logging. GAPS underwater communication is conducted by using various frequencies, interferences with simultaneously operating Echo Sounders are possiblePlease note that operations of GAPS requires experienced scientific staff on board. The system is not operated by the ship's crew. Announce operations with GAPS to AWI-Logistics prior to the cruise and clarify the data transfer after the cruise. Attention: Submarine cable must be connected and device must be submerged in water through moonpool in box keel before activating GAPS. |
Summary
Transducer Frequency:
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
GAPS: from 22 to 30 kHz; Transponder: 19.5, 20.0, 20.5 or 21 kHz |
Responsible Persons
Components
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
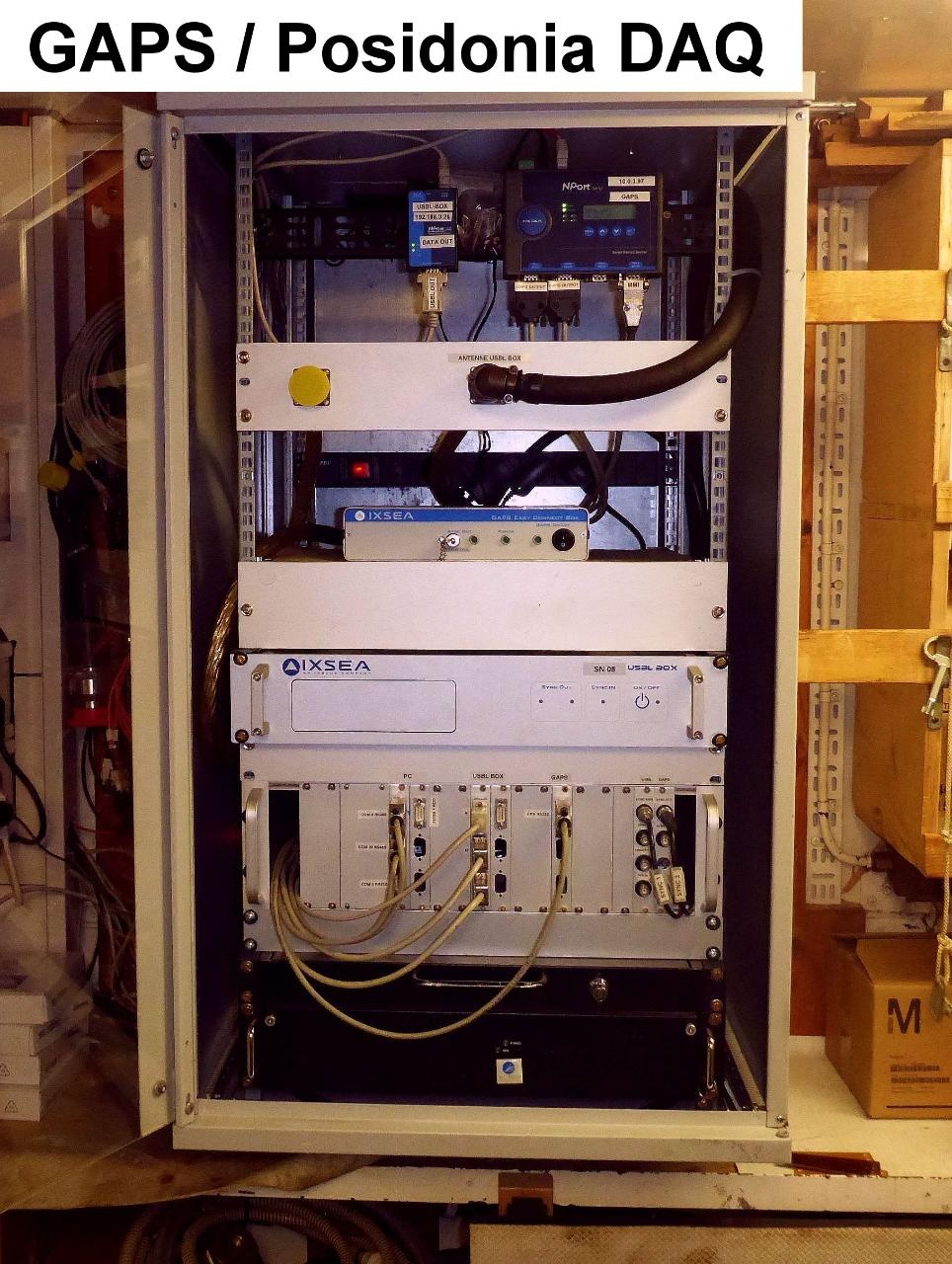
The system consits of the GAPS itself, mounting for installation in the hydrographic shaft, a transponder type MT832E-R, a transponder type MT832E-HD-R with removable head, Easy Connect Box (ECB) and monitoring software "GAPS MMI - Man Machine Interface". The system is hard-wired and the software is installed an configurated. The GAPS must be installed in the hydrographic shaft before operating, the transponders can be mounted wire or to submarine vehicle
GAPS muss für
den Einsatz im Hydrographenschacht montiert werden. Die Transponder
können am Draht (Halterung vorhanden) oder in einem Unterwasserfahrzeug
installiert werden.
Da das System akustisch mit diversen Frequenzen Unterwasser
kommuniziert, kann es zu Interferenzen mit anderen Echolotsystemen
kommen. Eine Liste der an Bord befindlichen Schwinger mit ihren
Frequenzen finden Sie hier.
GAPS
Das GAPS ist wie oben bereits erwähnt ein bi-direktionales
akustisches Ortungssystem, welches zwischen dem Schiff und einen oder
mehreren Transpondern kommuniziert. Dabei können deren Positionen und
Geschwindigkeiten relativ zum Schiff und absolut bestimmen kann. Der
Tranponder muss dabei mit dem Unterwasserobjekt oder Unterwasserfahrzeug
mechanisch verbunden sein. Das GAPS selbst wird über eine spezielle
Montageinrichtung im Hydrographenschacht montiert, unter dem
Schiffsboden gefahren.
Transponder vom Typ MT832E-R und MT832E-HD-R
Die akustischen Transponder sind auf das GAPS abgestimmt und können
im Transponder-Mode (akustisches Senden und Empfangen) oder im
Responder-Mode (elektrisches Senden und akustisches Empfangen) betrieben
werden, wobei für den Responder-Mode die Kabel und Stecker an Bord
nicht verfügbar sind. Für den Einsatz an der Winde bzw. am Kabel ist ein
Halter für den MT832E-R vorhanden um z.b. die Position von Probennahmen
in tieferen Gewässern genau bestimmen zu können. Der Transponder kann
bis zu einer Wassertiefe von 3.000m eingesetzt werden.
Easy Connect Box (ECB)
Die Easy Connection Box ist ein kleines Interface zur Verbindung des
GAPS, des externen GPS-Empfängers, des PCs mit der MMI-Software und des
Datenmanagementsystems DShip. Eingebaut ist die ECB im 19"-Rack im Mess-
und Registrierraum. Das Einschalten der ECB erfolgt über den
rückwärtigen Schalter. Der Schalter auf der Frontseite ist für das GAPS.
GAPS MMI - Man Machine Interface - Software
Die MMI-Software dient zur Inbetriebnahme des GAPS und zum Tracking
des am Unterwasserobjekt installiertem Transponders. Installiert ist sie
auf dem CTD-PC im Mess- und Registrierraum.
externer GPS-Empfänger (optional für andere Einsatzgebiete)
Das GAPS ist an Bord von FS Polarstern mit dem bordeigenen
GPS-Empfänger verbunden. Der externe GPS-Empfänger ist auf FS Polarstern
nicht erforderlich. |
Position
Data logging, storage and archiving
Logged parameters
| Sensorweb integration | ||||
|---|---|---|---|---|
| ||||
The Global Acoustic Positioning System (GAPS) combines an ultra-short baseline (USBL) acoustic positioning system and an inertial navigation system (INS) in the same housing to provide accurate position of any subsea object supplied with a transponder. Operating range is up to 4000m water depth with accuracy 0.2 percent of the distance to the object. The registration angle of 200 degree also enables position detection nearby sea surface. Electronic device ECB (Easy Connection Box) is installed in echo sounder device room E-525a. Operation is performed by software MMI. |
| Sensorweb integration | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||
|
| Sensorweb integration | ||||
|---|---|---|---|---|
| ||||
   |
Transducer Frequency:
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
Contacts
| Sensorweb integration | ||||||
|---|---|---|---|---|---|---|
| ||||||
|
Components
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
Position
| Sensorweb integration | ||||||||
|---|---|---|---|---|---|---|---|---|
| ||||||||
|
Data logging, storage and archiving
Logged parameters
| Sensorweb integration | |||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| |||||||||||||||||||||||||||||||||||||||||||||
|
Central geographical ship's position and time standard
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
Die Zeitsynchronisierung des PCs, auf dem die GAPS MMI - Software
installiert ist, erfolgt über die Windows-Domain-Zugehörigkeit. |
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
Eine Zentrierung der GPS-Antennenposition auf den GAPS und auf den Transponder findet statt |
Rawdata storage on board
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
Data storage in DShip system.
| ||
Dship
| Metadata (Metadata Plugin) | ||||
|---|---|---|---|---|
| Uncorrected measurement data||||
| Metadata list |
|---|
Data archiving on land
| space-metadata | ||
|---|---|---|
| ||
After the cruise the DShip data set can be extracted from https://dms.awi.de.
|
| Metadata list |
|---|
|| File format(s) | *.txt ||
|| Calibration certificates | NO || |
Documentation
...
| Metadata list |
|---|
Documentation
| Sensorweb integration | ||||
|---|---|---|---|---|
| ||||