Attention:
Please note that operations of the Sediment Echo Sounder Innomar SES requires experienced scientific staff on board for permanent supervision of data aquisition and storage. The system is not operated by the ship's crew. Announce operations with the Sediment Echo Sounder to AWI-Logistics prior to the cruise and clarify the data transfer after the cruise.
Summary
The Sediment Echo Sounder surveys the upper layers of the seafloor via the reflection of acoustic signals. Penetration of the sediment up to 70m can be achieved under good conditions. The system is operational up to 2000m water depth.
| Manufacturer | Innomar |
|---|---|
| Model | SES2000 |
| Serial No. | 2009/06/I/08/E |
| Type | echo sounder |
| SENSOR-Link | ↪ |


Transducer frequency
secondary low frequencies: 4, 5, 6, 8, 10, 12, 15 kHz
Contacts
| Name | Institution | Role |
|---|---|---|
| FIELAX GmbH | FIELAX Gesellschaft für wissenschaftliche Datenverarbeitung mbH | Engineer In Charge |
Components
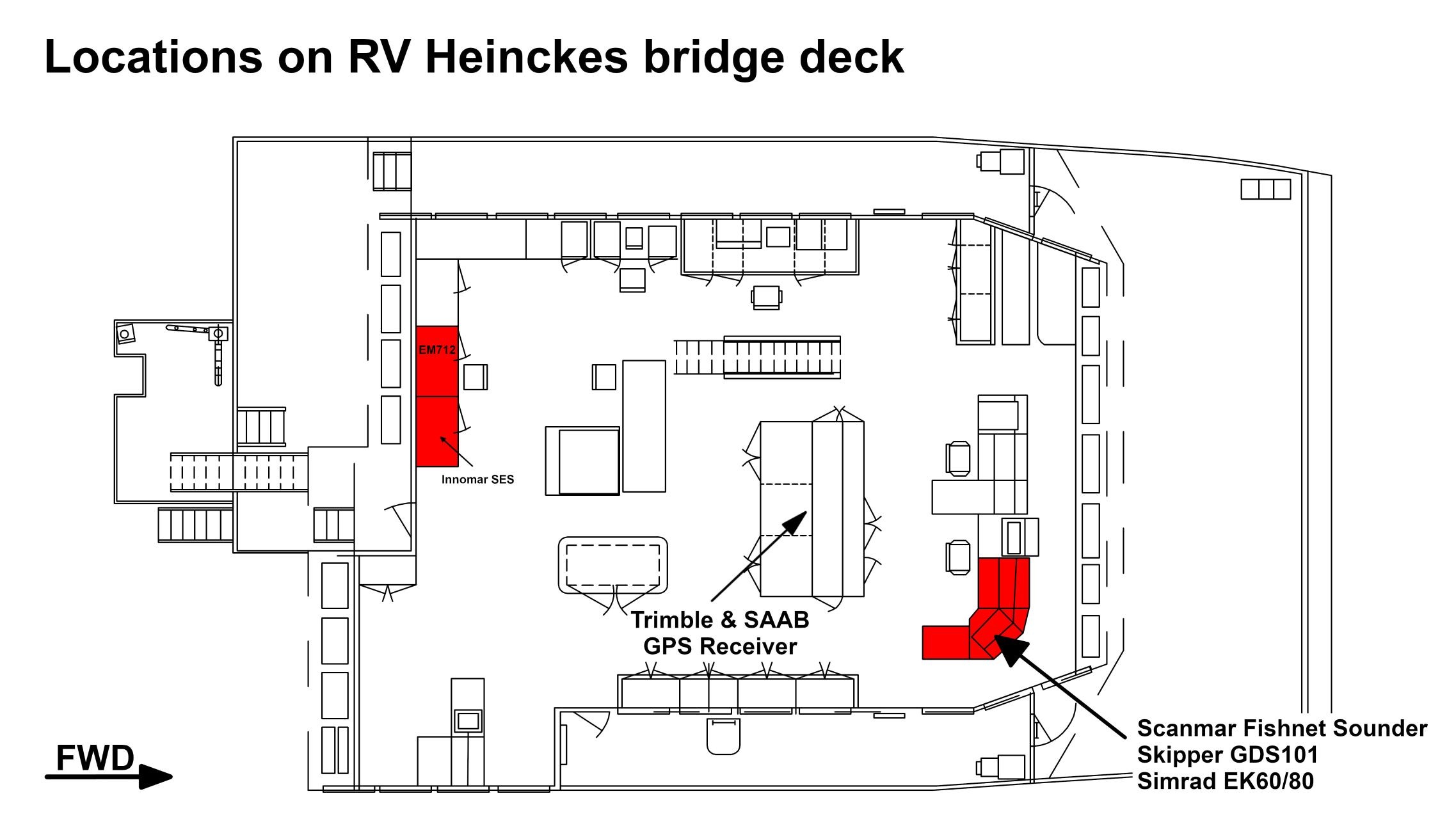
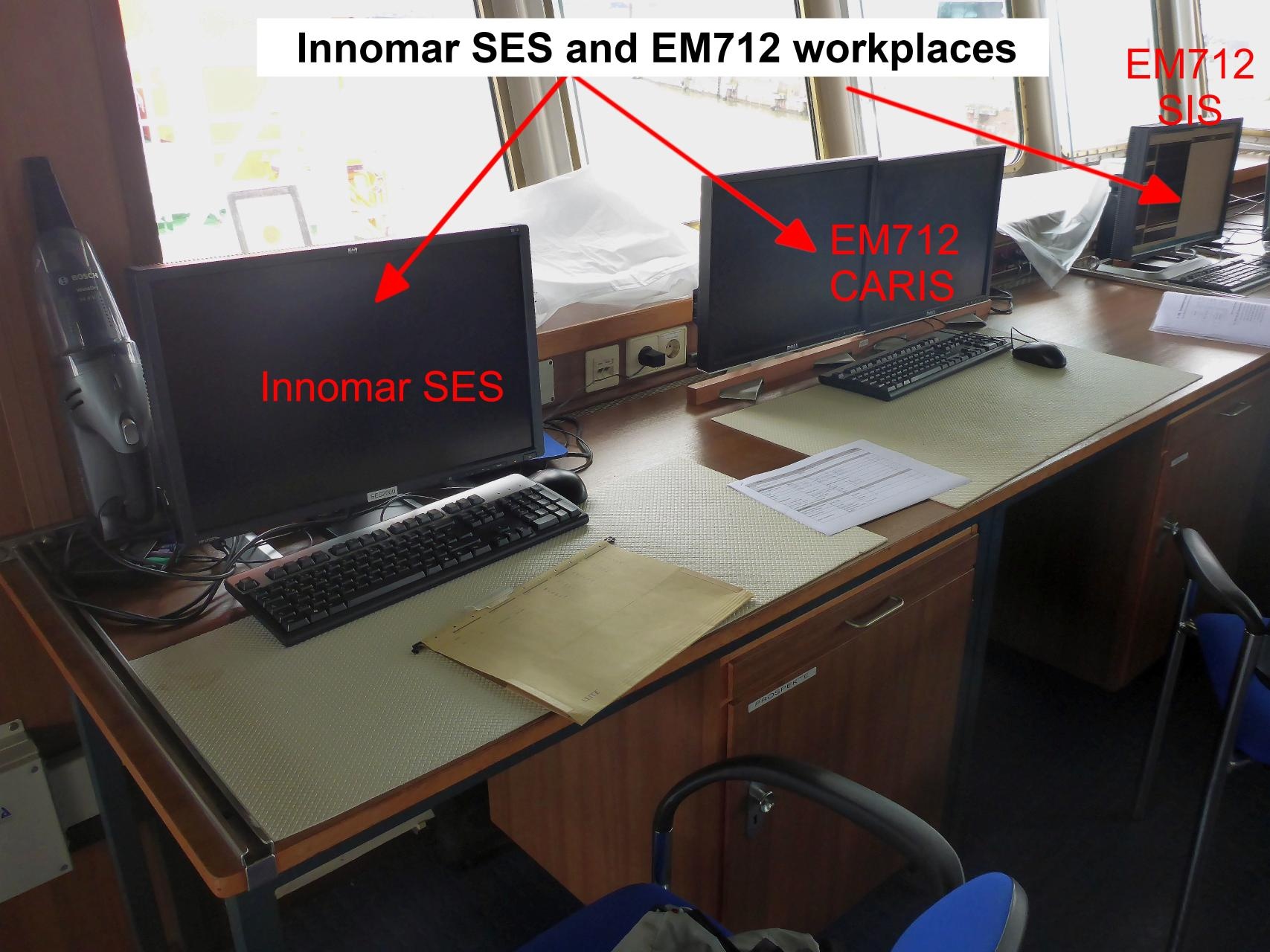
The SES system consists of the transducer, the main unit and a data aquisition PC. The software "SES for Windows" is installed on the aquisition PC. Furthermore two PCs with the processing software "ISE Post Processing Software for SES2000" are available on the bridge deck and in the Messraum.
No subdevices available.
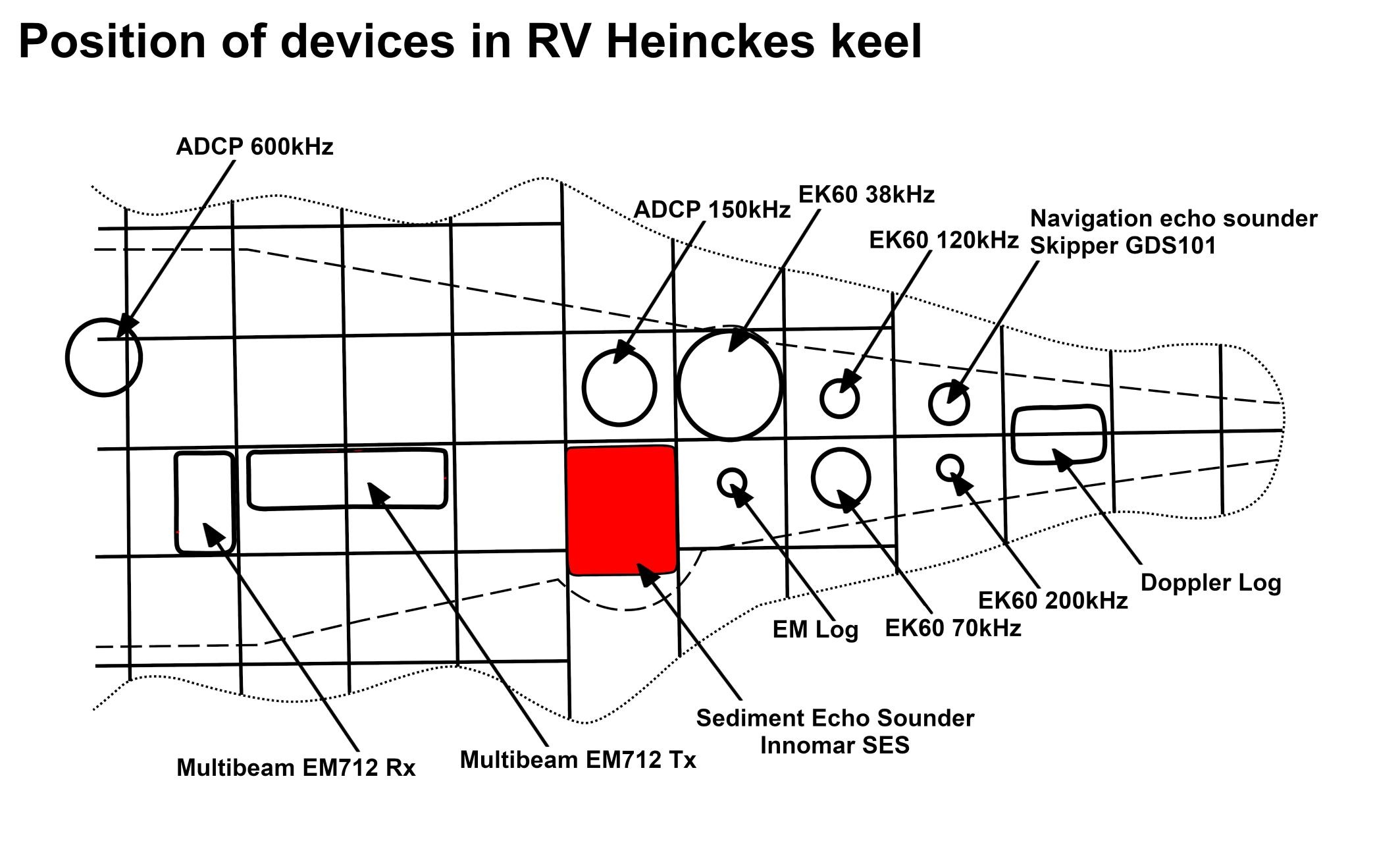
Position
| Info | xyz-position of transducer from Alignment Survey Report RV Heincke (January 2016). Electronics in Lotgeraeteraum on tween deck. Operation console on bridge deck and in the Messraum. |
| X | 45.027 m (Positive X axis is forward and along the centerline of the vessel with X0 at the Stern point of the vessel.) |
| Y | -0.371 m (Positive Y axis is portside of centerline with Y0 at centerline at the Very stern point of the vessel.) |
| Z | 0.085 m (Positive Z axis is upwards of basis. Z0 is set to the hydrophone on midship.) |
Data logging, storage and archiving
Logged parameters
| Parameter | Sensor Output Type | Unit |
|---|---|---|
| depth | depth | m |
Central geographical ship's position and time standard
Rawdata storage on board
root directory |
C:\SES_Applications\Data\ or xdc\home\scientists\HE***\sbp| |
|---|---|
directory name |
CruiseNo e.g. HE507 |
file name |
FilePrefix_YYYYMMMDDhhmmss.ses3 |
DShip
Device name |
Sub_Bottom_Profiler |
|---|---|
Parameters |
Depth [m] |