Summary
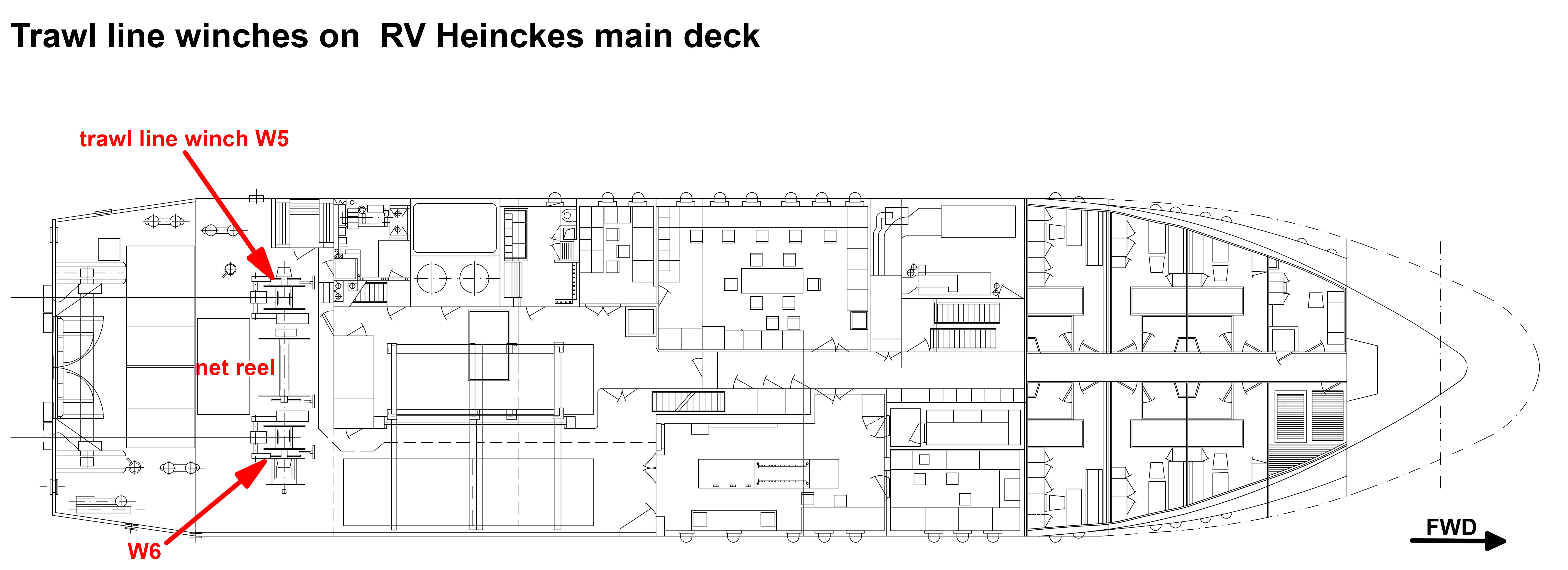
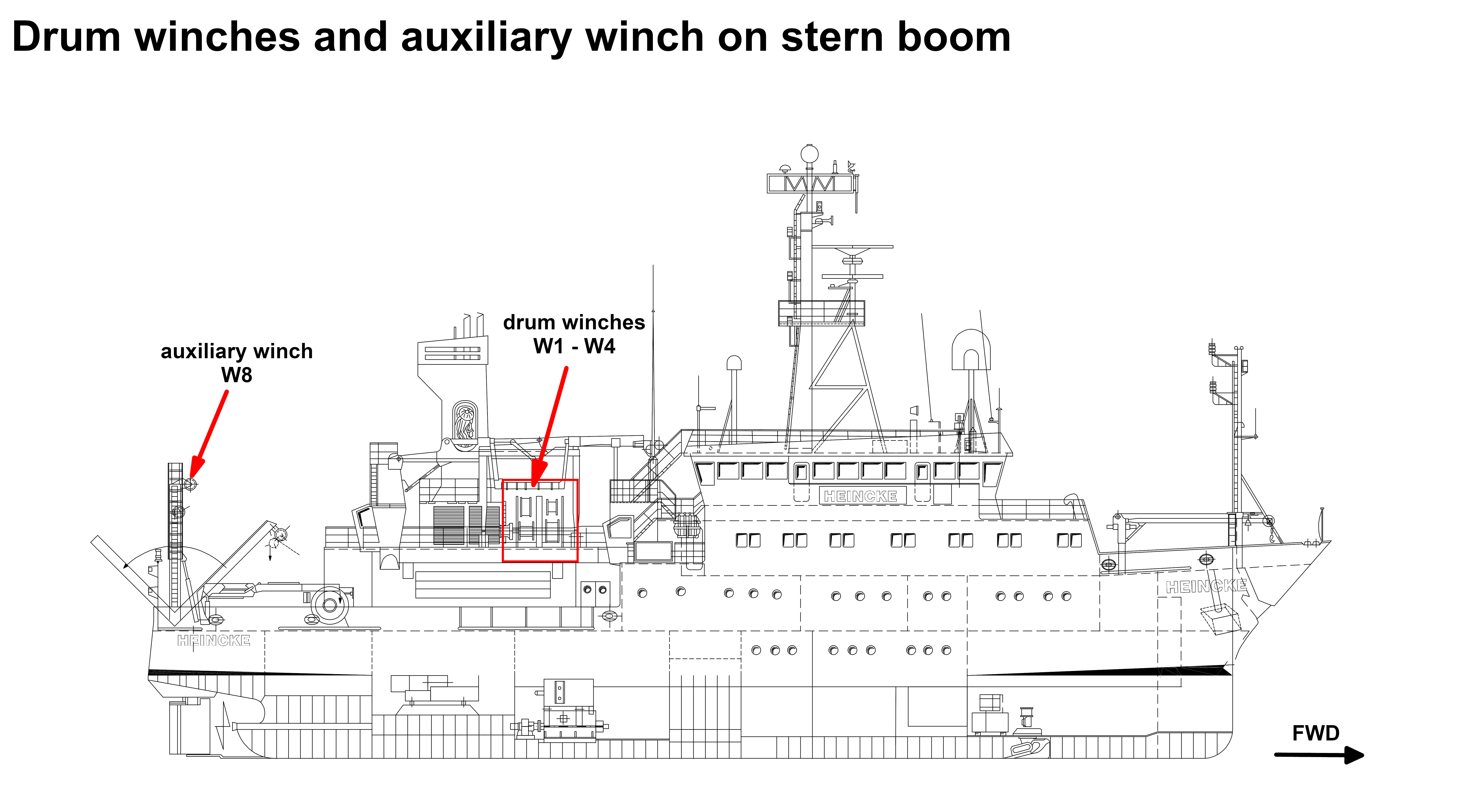
Most of the scientific activities can only be carried out with the usage of winches. Therefore the winches are among the most important devices onboard. The winch concept aims to redundancy and flexibility. Smooth operation is overseen by the ship's engineers.
Contacts
| Name | Institution | Role |
|---|---|---|
| Ralf Krocker | Alfred-Wegener-Institute for Polar and Marine Research | Engineer In Charge |
Components
The system consists of the GAPS antenna itself, mounting for installation at the ships bottom, the Easy Connect Box (ECB) and monitoring software "GAPS MMI - Man Machine Interface". The transponders can be mounted to winch wire or to a submarine vehicle or other submarine object.
GAPS is a bi-directional acoustic positioning system, which communicates between ship (antenna) and one or more transponders. Positions of the transponders are determined relative to the ship or absolute in geographic frame. GAPS must be installed with custom-built mounting and is operated below the ship's hull. It is deployed via the Hydrographenschacht.
Two acoustic transponders (MT832E-R and MT832E-HD-R) are available onboard RV Heincke. The transponders must be mechanically attached to underwater objects or vehicles. The transponders are synchronized to the GAPS and can be operated in transponder-mode (acoustic transmission and receiving) or in responder-mode (electric transmission and acoustic receiving; cables and plugs for responder-mode are not available on board). For transponder MT832E-R exists a winch cable mounting.
The Easy Connect Box (ECB) is a small interface to connect GAPS, external GPS receiver, PC with MMI-software and data management system DShip. It is switched on via the switch at the back of the ECB. The switch on the front is for the GAPS itself.
The GAPS MMI - Man Machine Interface - Software starts the GAPS and tracks the underwater transponders. It is installed on the CTD-PC in the Mess- und Registrierraum.
GAPS is connected to the GPS receiver on-board. Still there is an extra GPS receiver with accessories in case you want to use GAPS somewhere else.
No subdevices found for this sensor.
Position
| Origin Description: | Electronics of the GAPS system are located in the server rack in the Mess- and Registrierraum and software is installed on the CTD-PC. The GAPS is deployed via the Hydrographenschacht. |
Data logging, storage and archiving
Logged parameters
| Parameter | Sensor Output Type | Unit |
|---|---|---|
| heading | attitude | degree |
| latitude | latitude | degree |
| longitude | longitude | degree |
| altitude | attitude | m |
| roll | attitude | degree |
| pitch | attitude | degree |
| transponder number | index | unknown |
| x-coordinate | distance | m |
| y-coordinate | distance | m |
| z-coordinate | distance | m |
| depth | depth | m |
| month | date and time | unknown |
| time in hours | date and time | unknown |
| year | date and time | unknown |
| day | date and time | unknown |
Central geographical ship's position and time standard
Rawdata storage on board
DShip
Device name |
GAPS |
|---|---|
Parameters |
Transponder2; Transponder3; Transponder1; Ship0; Altitude std dev; GAPS.HEHDT.Sentence; GAPS.PIXSE.ATI.datafield01; GAPS.PIXSE.ATI.datafield04; GAPS.PIXSE.STDH.datafield01; GAPS.PIXSE.STDP.datafield01; Heading [deg]; Heading std dev; Latitude std dev; Longitude std dev; Pitch [deg]; Pitch std dev; Roll [deg]; Roll std dev |
Transponder Parameter |
Day; Depth [m]; EW; Month; NS; Time; Transponder No SAG; Transponder No SAX; X coordinate [m]; Y coordinate [m]; Year; Z coordinate [m] |
Ship0 Parameter |
Day; Depth [m]; EW; GAPS.PTSAG.0.Latitude; GAPS.PTSAG.0.Longitude; Month; NS; Time; Transponder_No_SAG;Transponder_No_SAX; X_coordinate [m]; Y_coordinate [m]; Year; Z_coordinate [m] |
Data archiving on land
Documentation
- GAPS_datasheet (Factsheet, 479 kB)
- GAPS Positioning System User Manual (User Manual, 21 MB)
- GAPS Carbon V.1 User Guide (User Manual, 12 MB)
- GAPS techical description (Factsheet, 4 MB)
- GAPS technical drawing (Factsheet, 542 kB)