Attention:
Please note that operations of the Acoustic Doppler Current Profiler requires experienced scientific staff on board. The system is not operated by the ship's crew. Announce operations with the Acoustic Doppler Current Profiler to AWI-Logistics prior to the cruise and clarify the data transfer after the cruise.
Summary
The Ocean Surveyor/Ocean Observer is designed for current profile measurement in the upper ocean water. The system consists of a transducer and electronics chassis. Data are transmitted in either an ASCII or binary format through the I/O cable.
| Manufacturer | Teledyne RDI |
|---|---|
| Model | Ocean Surveyor |
| Serial No. | Transducer S/N 3118, Chassis S/N 1743 |
| Type | current profiler |
| REGISTRY-Link | ↪ REGISTRY (9203) |
Transducer Frequency
150_kHz
Contacts
| Name | Institution | Role |
|---|---|---|
| Ralf Krocker | Alfred Wegener Institute, Helmholtz Centre for Polar and Marine Research | Device Contact |
| FIELAX GmbH | FIELAX Gesellschaft für wissenschaftliche Datenverarbeitung mbH | Device Contact |
Components
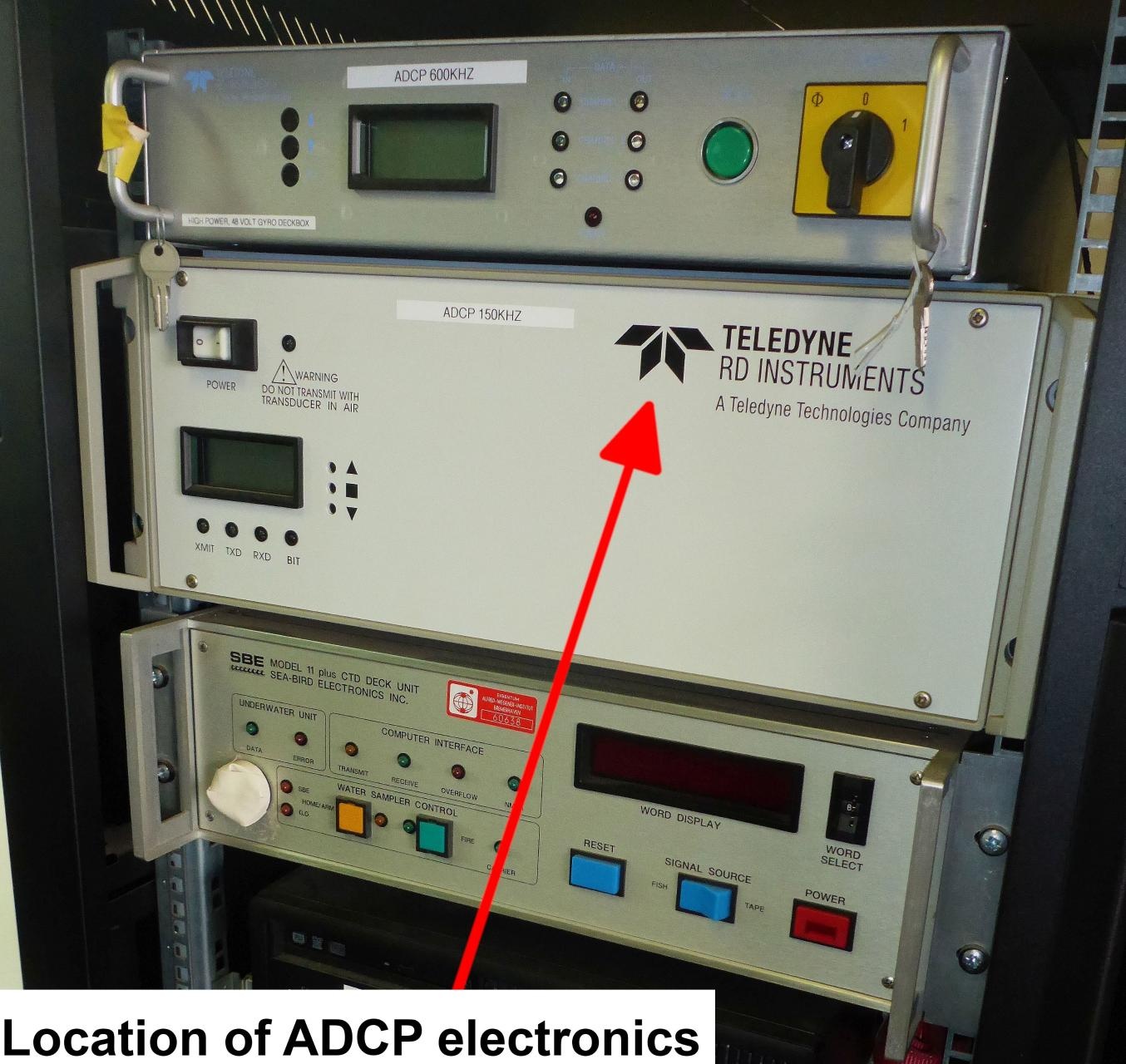
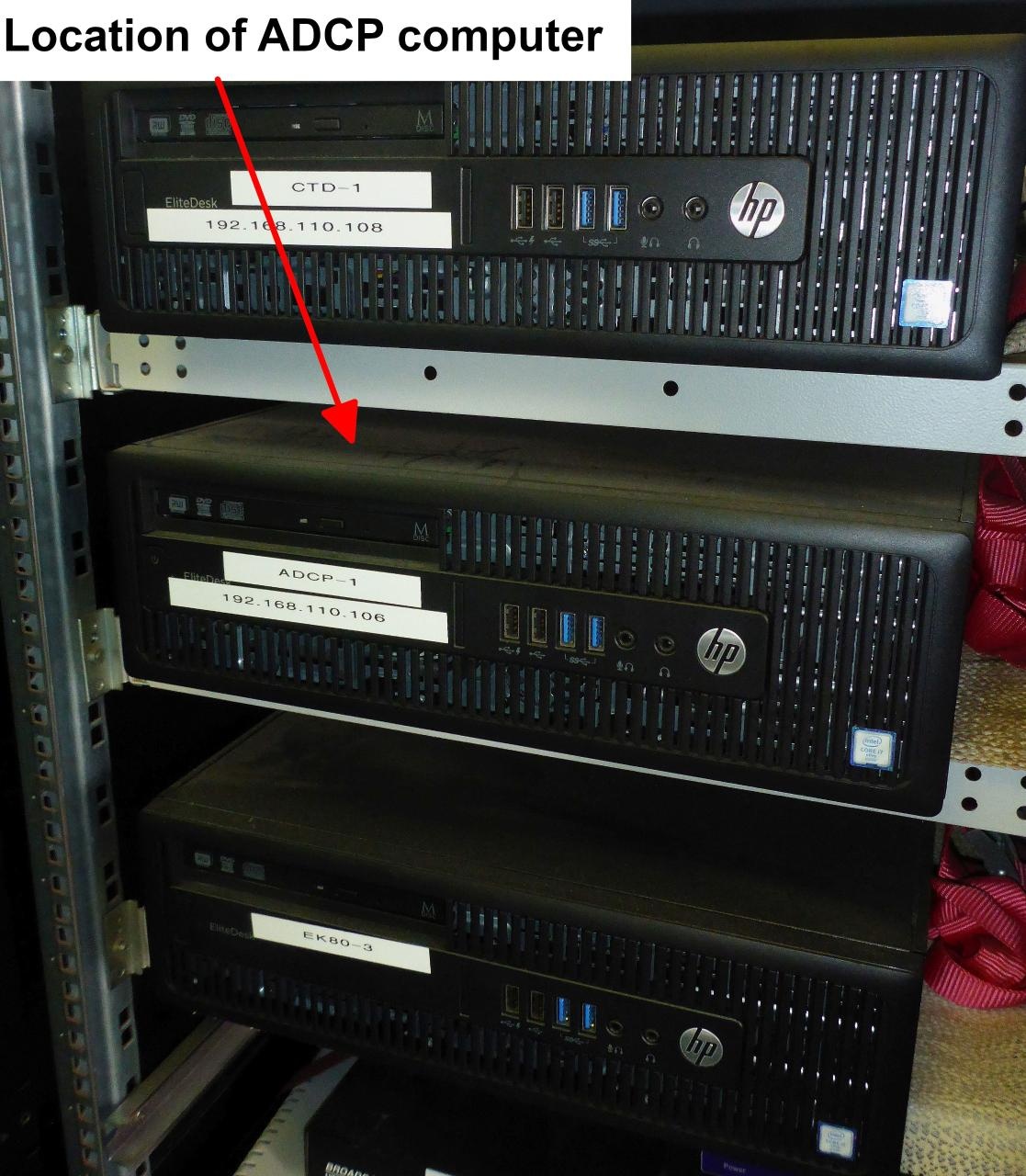
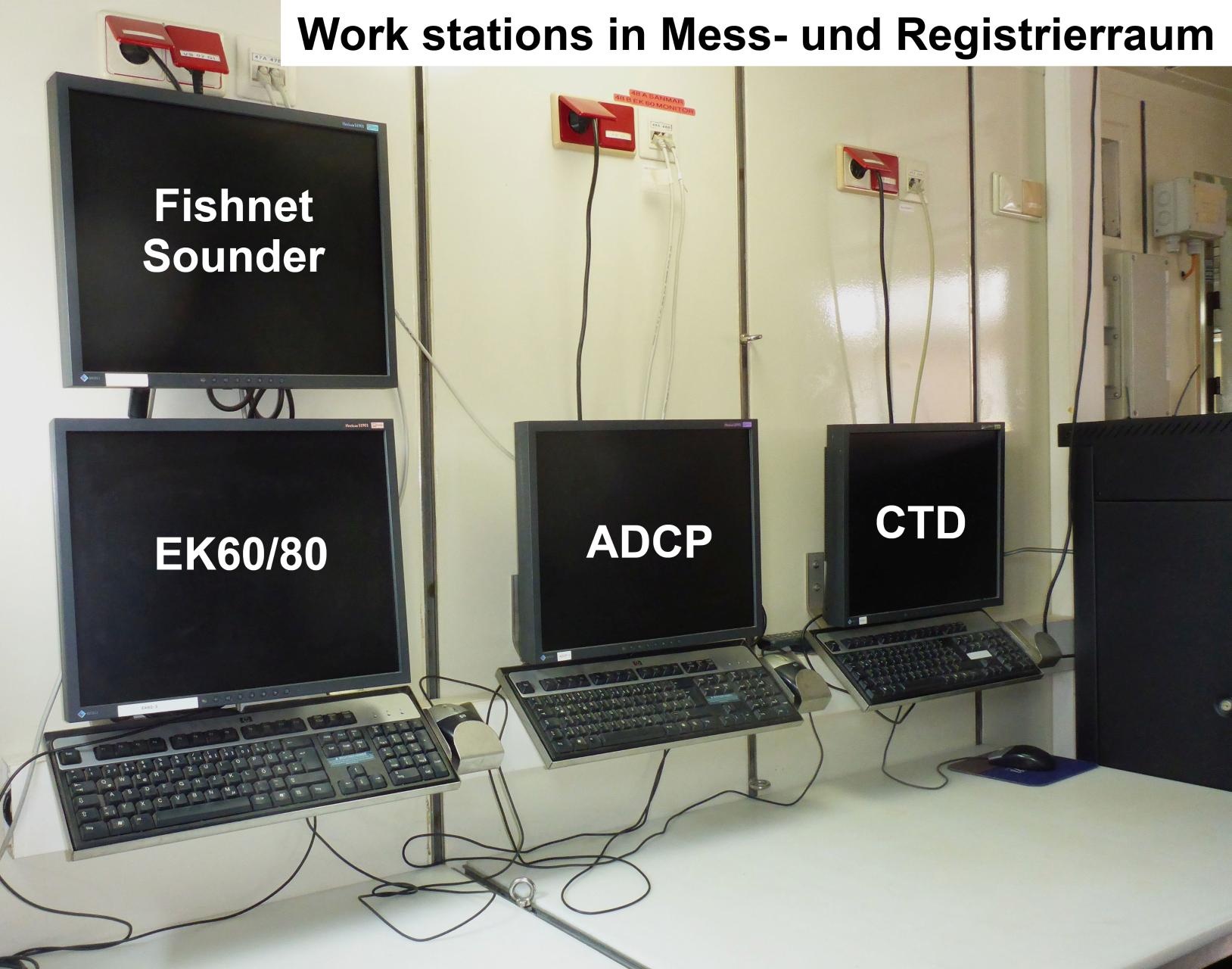
The transducer of the Ocean Surveyor 150 kHz is hull mounted in the keel of RV Heincke. The angle between the ship centerline and transducer centerline is 45° direction starboard. The electronics chassis and the operator PC are situated in the Mess- and Registrierraum on the main deck. The data acquisition and processing software VmDas and the synchronizing software Easy2Sync are installed on the computer.
Position
| Info | xyz-position of the 150kHz transducer from Alignment Survey Report RV Heincke (January 2016) The transducer is hull mounted in the keel of RV Heincke. The operators PC and the electronic chassis are situated in the Mess- and Registrierraum. |
| X | 45.022 m (Positive X axis is forward and along the centerline of the vessel with X0 at the Stern point of the vessel.) |
| Y | -0.233 m (Positive Y axis is portside of centerline with Y0 at centerline at the Very stern point of the vessel.) |
| Z | -0.088 m (Positive Z axis is upwards of basis. Z0 is set to the hydrophone on midship.) |
Data logging, storage and archiving
Logged parameters
| Parameter | O2ARegistry Output Type | Unit |
|---|---|---|
| current velocities in depth range up to max. 400m | current speed | m/s |
Central geographical ship's position and time standard
The GPS position of the Trimble GPS receiver antenna is stored in the data files. The position is NOT centralized to the ADCP transducers. Time synchronisation is achieved via NTP.
Rawdata storage on board
The data acquisition and processing software VmDas creates rawdata on the local drive of the computer. Every hour the software Easy2Sync copies the data to a local backup file structure. Every 3 hours the software Easy2Sync synchronizes the backup data to the directory structure of the mass storage. Attention: Deleting files in the directory structure of the mass storage will also delete these files in the backup file structure with the next synchronization run. But: As long as these files are not removed from the local rawdata drive these files will be copied again to the local backup file structure with the next backup run and to the directory structure of the mass storage with the next synchronization run.
root directory | C:\ADCPData\ or C:\ADCPDataBackup\ or: xdc\home\scientists\data\ADCP\... |
|---|---|
directory name | CruiseNo e.g. HE507 |
file name | CruiseNoVVV_RRRRRR.ENR, CruiseNoVVV_RRRRRR.ENS, CruiseNoVVV_RRRRRR.ENX, CruiseNoVVV_RRRRRR.LTA, CruiseNoVVV_RRRRRR.N1R, CruiseNoVVV_RRRRRR.NMS, CruiseNoVVV_RRRRRR.STA, CruiseNoVVV_RRRRRR.LOG, CruiseNoVVV_RRRRRR.VMO |
Data volume (MB per day) ca | 350 |
Number of files per day ca | 35 |
DShip
The ADCP data are not transferred to DShip.
Data archiving on land
After consultation with the data scientist and AWI Logistics the ADCP data including meta data may be transferred to PANGAEA (https://www.pangaea.de/![]() ).
).