Summary
...
| urn | vessel:heincke:gaps |
|---|---|
| contenttype | Summary |
Most of the scientific activities can only be carried out with the usage of winches. Therefore the winches are among the most important devices onboard. The winch concept aims to redundancy and flexibility. Smooth operation is overseen by the ship's engineers.
Contacts
...
Contacts
| Name | Institution | Role |
|---|
...
| Reederei Briese | Reederei Briese |
...
| Engineer In Charge |
Components
The system consists of the GAPS antenna itself, mounting for installation at the ships bottom, the Easy Connect Box (ECB) and monitoring software "GAPS MMI - Man Machine Interface". The transponders can be mounted to winch wire or to a submarine vehicle or other submarine object.
GAPS is a bi-directional acoustic positioning system, which communicates between ship (antenna) and one or more transponders. Positions of the transponders are determined relative to the ship or absolute in geographic frame. GAPS must be installed with custom-built mounting and is operated below the ship's hull. It is deployed via the Hydrographenschacht.
Two acoustic transponders (MT832E-R and MT832E-HD-R) are available onboard RV Heincke. The transponders must be mechanically attached to underwater objects or vehicles. The transponders are synchronized to the GAPS and can be operated in transponder-mode (acoustic transmission and receiving) or in responder-mode (electric transmission and acoustic receiving; cables and plugs for responder-mode are not available on board). For transponder MT832E-R exists a winch cable mounting.
The Easy Connect Box (ECB) is a small interface to connect GAPS, external GPS receiver, PC with MMI-software and data management system DShip. It is switched on via the switch at the back of the ECB. The switch on the front is for the GAPS itself.
The GAPS MMI - Man Machine Interface - Software starts the GAPS and tracks the underwater transponders. It is installed on the CTD-PC in the Mess- und Registrierraum.
GAPS is connected to the GPS receiver on-board. Still there is an extra GPS receiver with accessories in case you want to use GAPS somewhere else.
| Sensorweb integration | ||||
|---|---|---|---|---|
| ||||
No subdevices found for this sensor. |
Position
| Sensorweb integration | ||||
|---|---|---|---|---|
| ||||
|
Data logging, storage and archiving
Logged parameters
| Sensorweb integration | ||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||||||||||||||||||||||||||||||||||
|
Central geographical ship's position and time standard
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
Time synchronising of the PC with MMI-Software via Windows-Domain-Affiliation. Centering of GPS-antenna position to GAPS and to transponders. |
Rawdata storage on board
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
Data storage in DShip system.
|
DShip
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
Uncorrected measurement data. |
| Metadata list |
|---|
|| Device name | GAPS ||
|| Parameters| Transponder2; Transponder3; Transponder1; Ship0; Altitude std dev; GAPS.HEHDT.Sentence; GAPS.PIXSE.ATI.datafield01; GAPS.PIXSE.ATI.datafield04; GAPS.PIXSE.STDH.datafield01; GAPS.PIXSE.STDP.datafield01; Heading \[deg\]; Heading std dev; Latitude std dev; Longitude std dev; Pitch \[deg\]; Pitch std dev; Roll \[deg\]; Roll std dev ||
|| Transponder Parameter| Day; Depth \[m\]; EW; Month; NS; Time; Transponder No SAG; Transponder No SAX; X coordinate \[m\]; Y coordinate \[m\]; Year; Z coordinate \[m\] ||
|| Ship0 Parameter| Day; Depth \[m\]; EW; GAPS.PTSAG.0.Latitude; GAPS.PTSAG.0.Longitude; Month; NS; Time; Transponder_No_SAG;Transponder_No_SAX; X_coordinate \[m\]; Y_coordinate \[m\]; Year; Z_coordinate \[m\] || |
Data archiving on land
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
After the cruise the DShip data set can be extracted from https://dms.awi.de.
|
Documentation
...
| urn | vessel:heincke:gaps |
|---|---|
| contenttype | Resources |
...
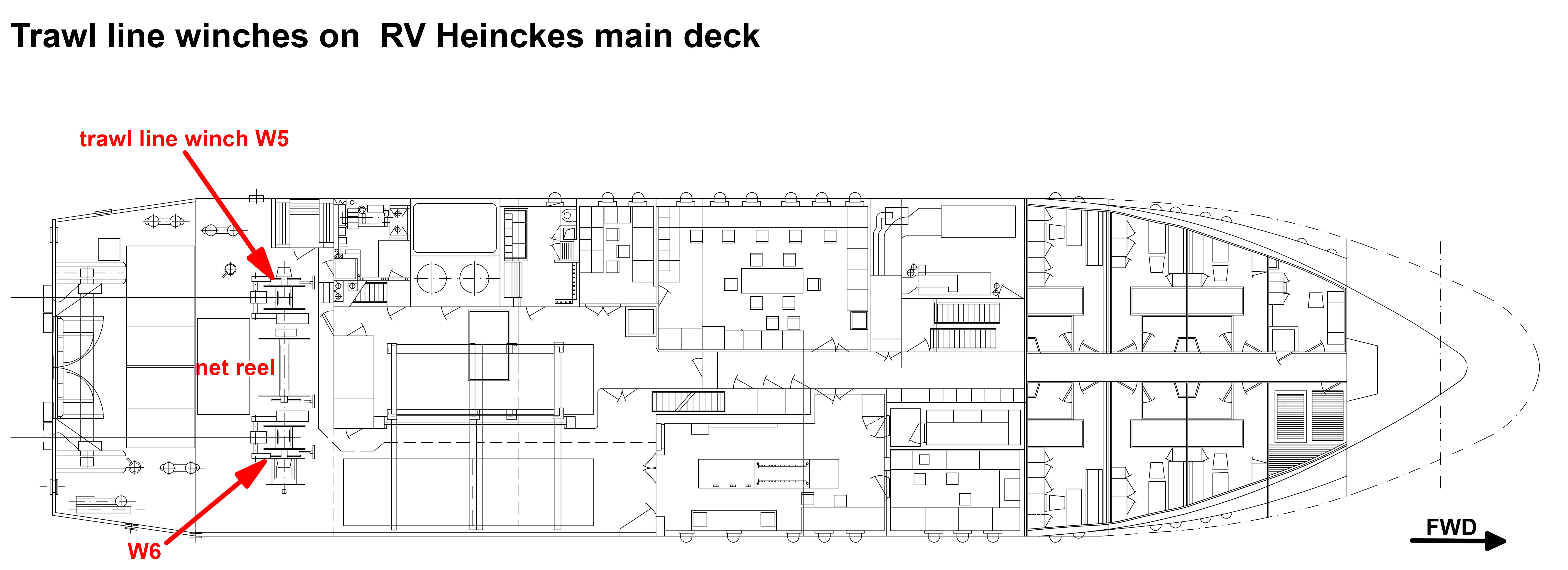
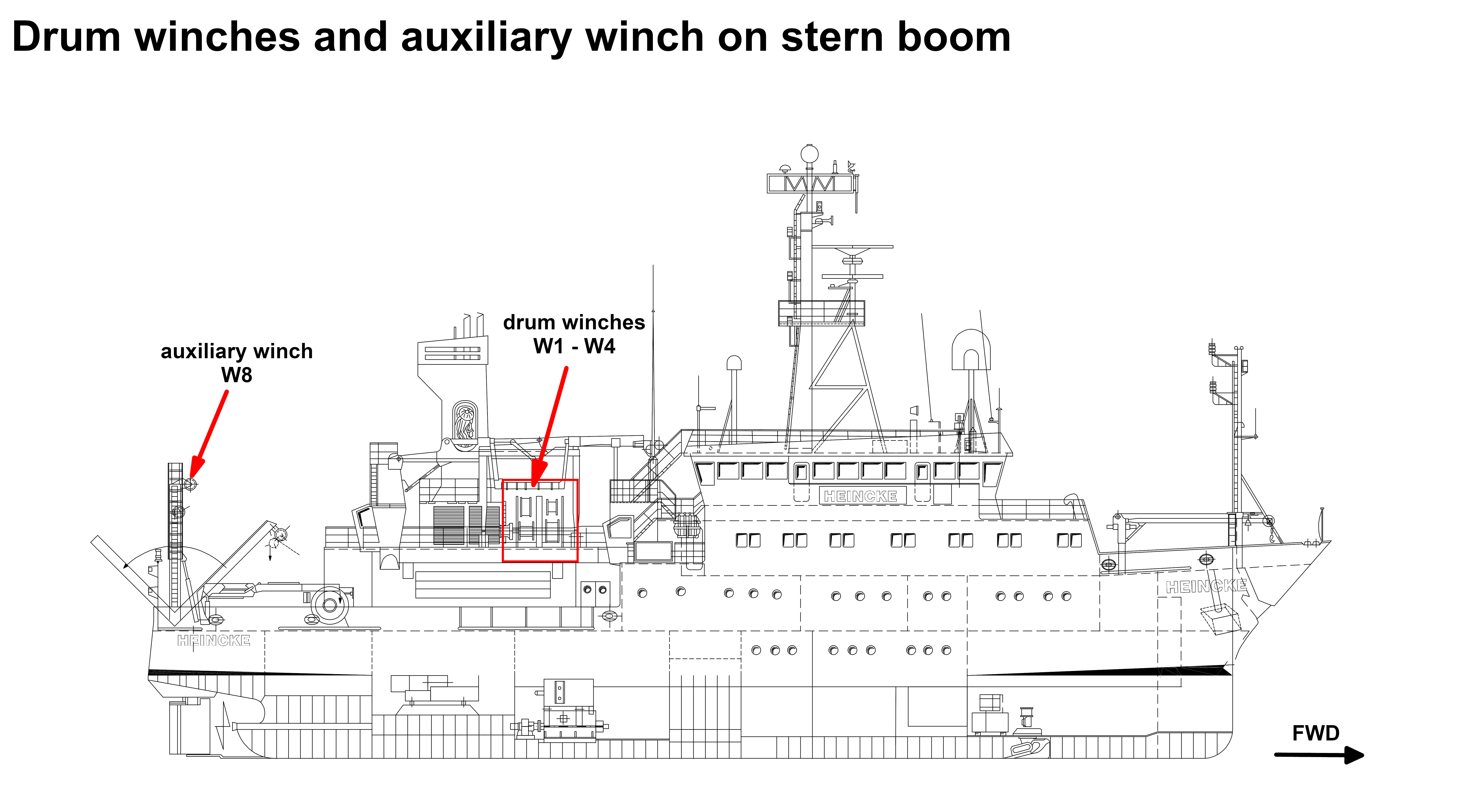
Following winches are used onboard:
W1-W4 | 4-drum winches |
W5 | trawl line winch starboard |
W6 | trawl line winch portside |
W8 | auxiliary winch on stern boom |
The winches are hydraulic and are powered by a central hydraulic unit. A side boom is installed on the starboard side for keeping winches and cables on the outboard. The side boom operates one of the 4 wires of the drum winches on the starboard side. Astern the cables are lead outboard via the stern boom.
4-drum winches
| capacity intermediate rope layer | max. rope speed intermediate rope layer | slip ring transmitter | |
|---|---|---|---|
| W1 | 20 kN | 0..120m/min | yes |
W2 | 30 kN | 0..80m/min | no |
| W3 | 30 kN | 0..80m/min | yes |
| W4 | 20 kN | 0..120m/min | yes |
Trawl line winches
| capacity intermediate rope layer | max. rope speed intermediate rope layer | slip ring transmitter | |
|---|---|---|---|
| W5/W6 | 40 kN | 0..60m/min | no |
Auxiliary winch on stern boom
| capacity intermediate rope layer | max. rope speed intermediate rope layer | slip ring transmitter | |
|---|---|---|---|
| W8 | 30 kN | 0..40m/min | no |
Wiring
State of June 2015
W1 | 8mm-single conductor wire, length 2070m, 9.2 Ohm/km, connector SubConn IL-2-F (female) requiring IL-2-M (male) connector on the device side |
W2 | 6mm-wire, length 2750m, steel wire Niro, 20kN breaking force |
W3 | 11mm-single conductor wire, length 890m, 19 Ohm/km, connector SubConn IL-2-F (female) requiring IL-2-M (male) connector on the device side |
W4 | 11mm-single conductor wire, length 1760m, 19 Ohm/km, connector SubConn IL-2-F (female) requiring IL-2-M (male) connector on the device side |
W5+W6 | 18mm-steel wire, length 2400m on each starboard side and portside |
W8 | 16mm-galvanised steel wire, length 40m |
Applying to all single conductor wires: The single conductor wires are lead via a Ramert slip ring transmitter and a RG214U-cable into the Mess- und Registrierraum where the signal can be tapped at normal sockets. Slip ring transmitters are maintained yearly.
...