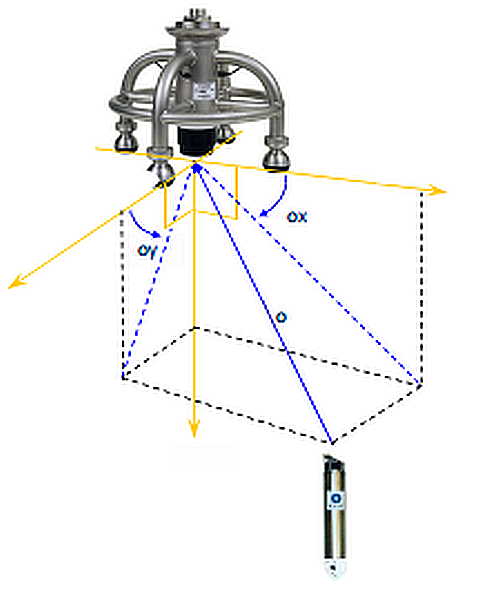
The mounting of USBL antenna is executed by ships crew, the operation of the system must be executed by experienced scientific staff. The need of the system has to be announced in cruise planning docment "Einsatzplanung" prior to the cruise. In case of sea ice conditions the system must be operated with no ship speed but following ROV or drifting is allowed. In free ice conditions moving of ship is allowed up to 5 knots speed using deployable antenna or maximum ship speed using flush antenna or Thomson Marconi antenna. In case of deployable antenna or Thomson Marconi antenna preparation takes ca 45 minutes: removing ice protection of moon pool and lowering antenna. The reverse procedure for deinstallation takes the same time. In case of flush antenna the ice protection window must be opened which takes a few moments. Opening angle for transponder detection amounts to 60 degrees. The detection range amounts to 8000m. Posidonia system is not compatible with USBL system Global Acoustic Positioning System (GAPS), which is also available on board. |