...
| Sensorweb integration |
|---|
| urn | vessel:heincke:trimble_5228k50585 |
|---|
| contenttype | Summary |
|---|
|
The SPS461 GPS Heading and Positioning Receivers are modular, dual-antenna systems for marine construction and hydrographic survey. It may improve accuracy by using DGPS via SBAS, OmniSTAR VBS, MSK Beacon or external RTCM DGPS corrections. The receiver is equipped with a single GA530 L1/L2/OmniSTAR/Beacon/SBAS antenna. Therefore heading, roll and pitch cannot be calculated. |
...
| Sensorweb integration |
|---|
| urn | vessel:heincke:trimble_5228k50585 |
|---|
| contenttype | Metadata |
|---|
|
| Manufacturer | Trimble |
|---|
| Model | Trimble Marine SPS461 |
|---|
| Serial No. | n/a5228K50585 |
|---|
| Type | satellite positioning system |
|---|
| REGISTRY-Link | ↪ REGISTRY (8571) |
|---|
|
Contacts
| Sensorweb integration |
|---|
| urn | vessel:heincke:trimble_5228k50585 |
|---|
| contenttype | Contacts |
|---|
|
| Name | Institution | Role |
|---|
Peter Gerchow |
|---|
| Alfred-Wegener-Institute | Data Provider | Ralf Krocker | Alfred - Wegener - Institute, Helmholtz Centre for Polar and Marine Research | Engineer In Charge |
|
...
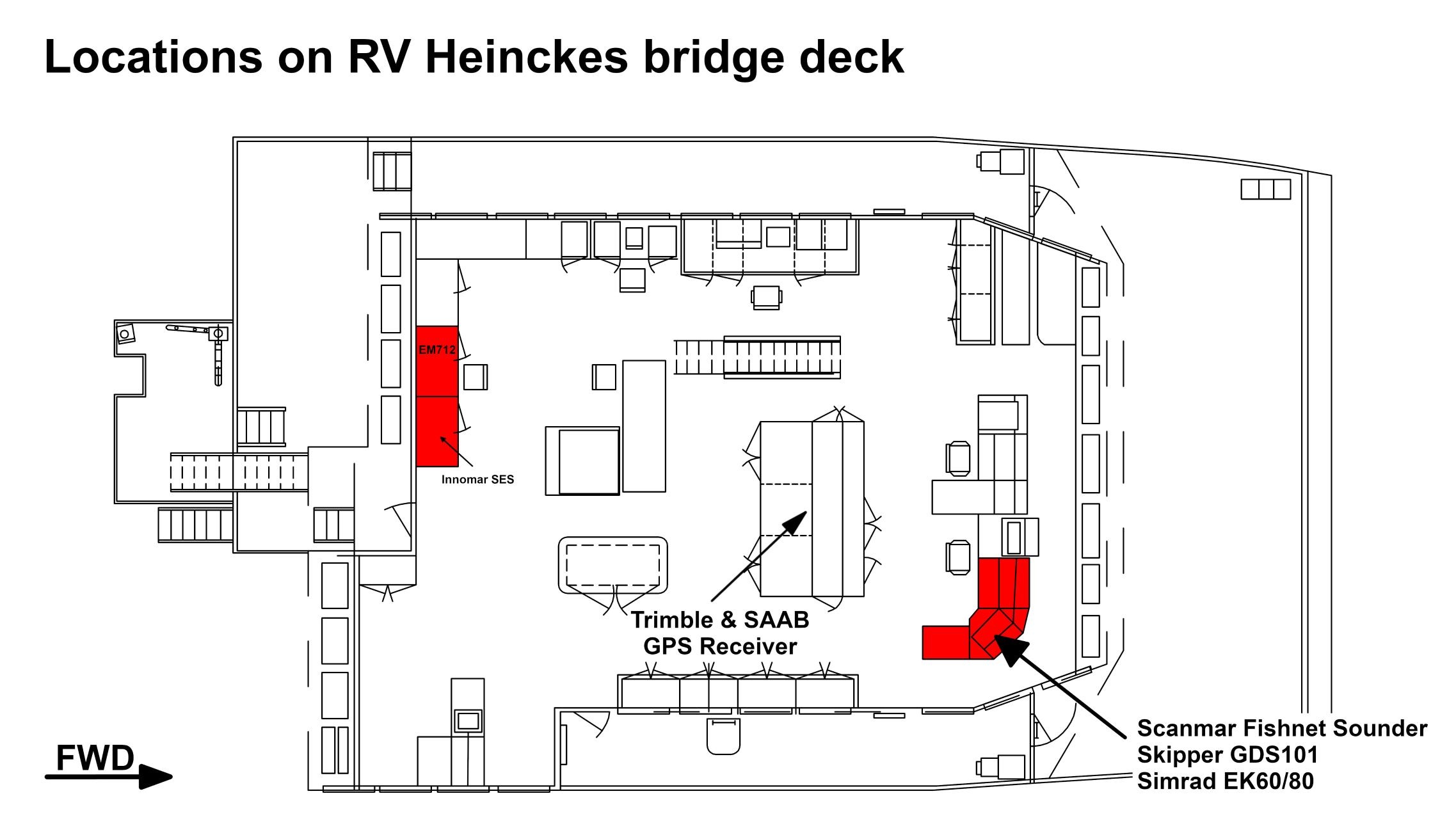
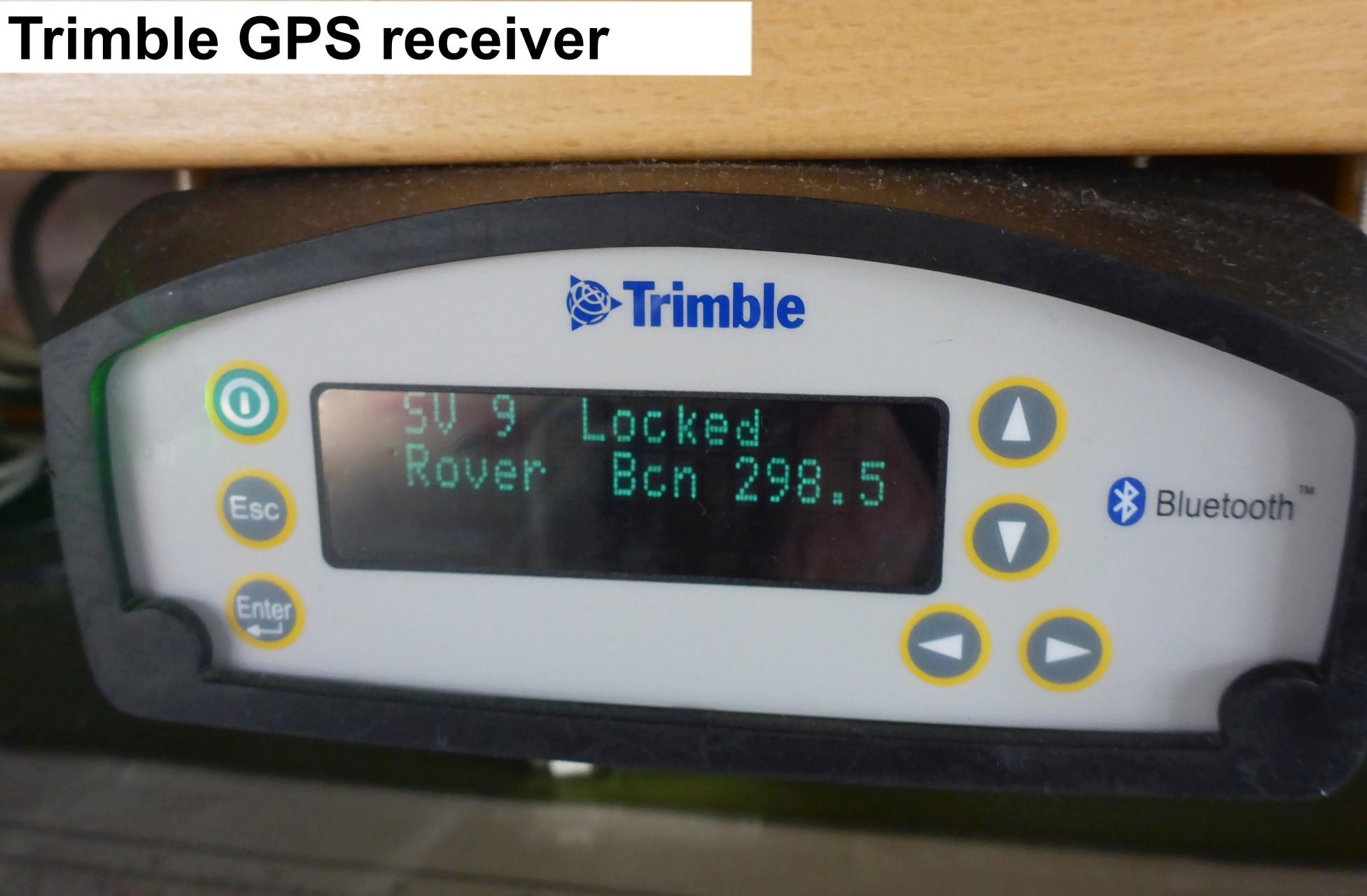
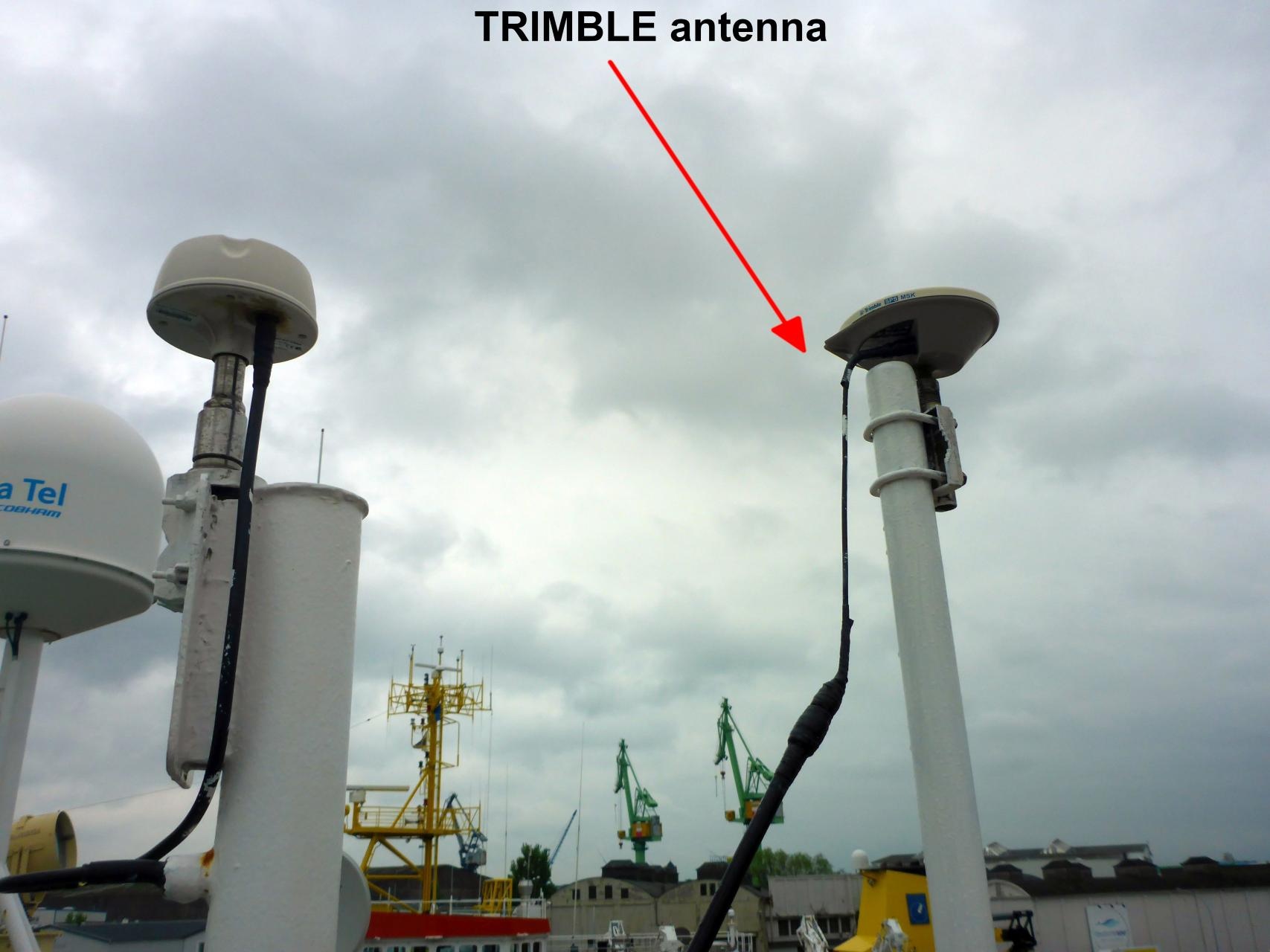
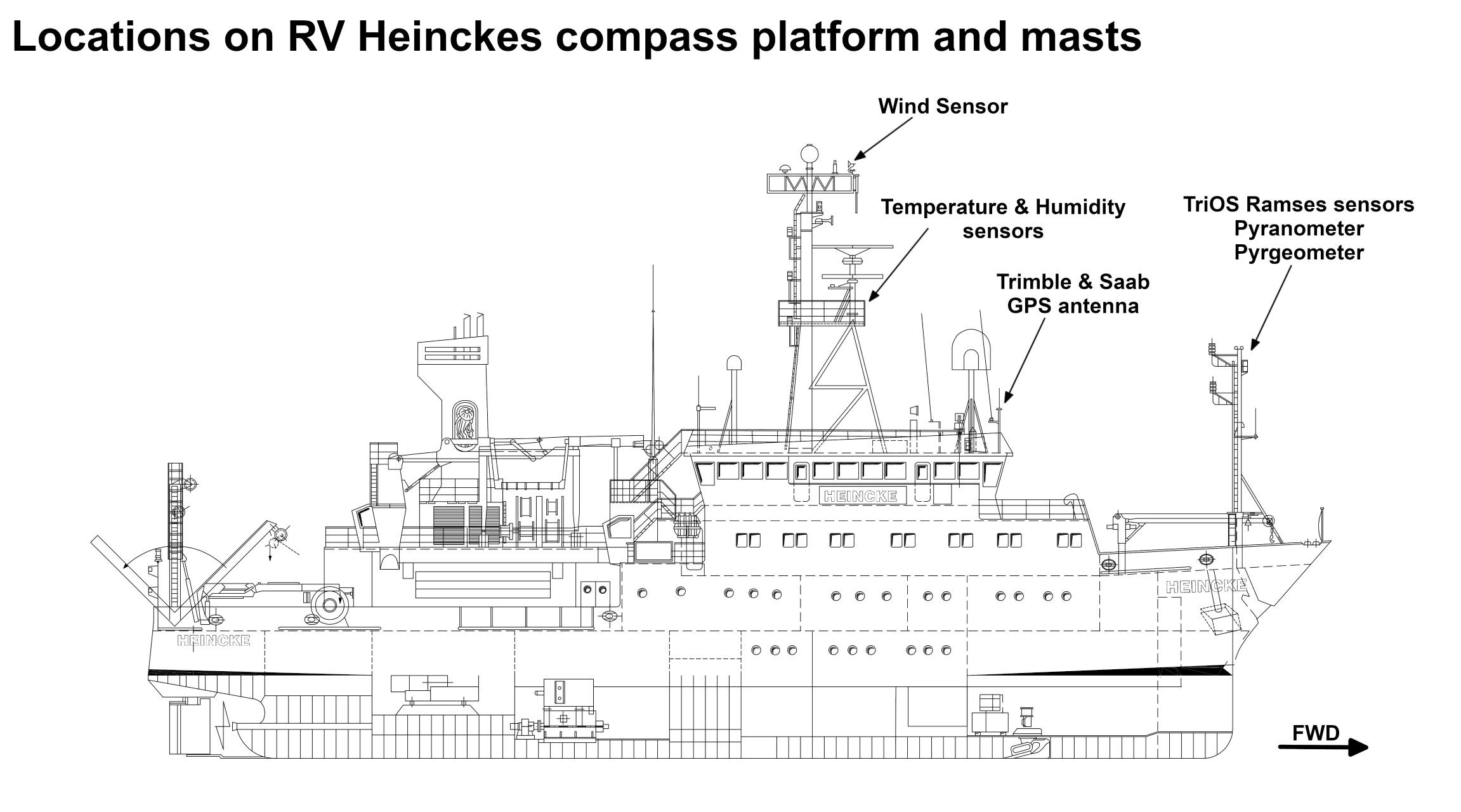
The GPS receiver is installed on the bridge deck. The antenna is installed on the observation deck.
In the registration lab an NMEA stream of GPS records can be received. 4 sockets of RS232 type (DSub9) with following setting are available: 4800 Baud, No Parity, 8 Data Bits, 1 Stop Bit.
NMEA records of type $GPGGA, $GPVTG, $GPZDA, $GPRMC, $GPGLL are provided with 1 Hz.
| Sensorweb integration |
|---|
| urn | vessel:heincke:trimble_5228k50585 |
|---|
| contenttype | Subdevices |
|---|
|
No subdevices found for this sensoravailable. |
Position
| Sensorweb integration |
|---|
| urn | vessel:heincke:trimble_5228k50585 |
|---|
| contenttype | LocalFrame |
|---|
|
| Origin Description:Info | xyz-position of antenna from Alignment Survey Report RV Heincke (January 2016). Antenna located on observation deck, device located on bridge deck. | | X: | 39.6 m
(Positive X axis is forward and along the centerline of the vessel with X0 at the Stern point of the vessel. ) | | Y: | -2.129 m
(Positive Y axis is portside of centerline with Y0 at centerline at the Very stern point of the vessel. ) | | Z: | 16.433 m
(Positive Z axis is upwards of basis. Z0 is set to the hydrophone on midship.) |
|
Data logging, storage and archiving
Logged parameters
| Sensorweb integration |
|---|
| urn | vessel:heincke:trimble_5228k50585 |
|---|
| contenttype | Parameters |
|---|
|
| Parameter | Sensor O2ARegistry Output Type | Unit |
|---|
| latitude | latitude | degree | | longitude | longitude | degree | altitude | distance |
|---|
| m | course over ground | attitude | degreedeg | | day | date and time | d | | latitude | latitude | degday | | month | date and time | mo | | longitude | longitude | degmonth | | year | date and time | yeara | | differential reference station ID | index | number | | GPS quality indicator | quality flag | number | | number of satellites | index | number | | speed over ground | speedknots | knot | | altitude | distance | m |
|
Additionally a computer is installed receiving T02 data from this sensor. These data are used to calculate GPS tide. Three different services are available: 1=Uncorrected, 2=Ultra-rapid and 3=Rapid/Final. GPS tide is provided as two column file (date/time, height) to be used by multibeam echo sounder. See more details in Heincke_GPS_Tide_v20191016.pdf.
Central geographical ship's position and time standard
...
| Metadata (Metadata Plugin) |
|---|
|
|
Rawdata storage on board
Data storage in DShip system.
...
| Metadata (Metadata Plugin) |
|---|
|
|
Dship
| Metadata (Metadata Plugin) |
|---|
|
|
Data archiving on land
| Metadata (Metadata Plugin) |
|---|
|
Data archiving on land
...
Documentation
| Sensorweb integration |
|---|
| urn | vessel:heincke:trimble_5228k50585 |
|---|
| contenttype | Resources |
|---|
|
|