| Note |
|---|
|
The need of the system has to be announced in cruise planning document "Einsatzplanung" prior to the cruise. The mounting of USBL antenna is executed by ships crew, the operation of the system must be executed by experienced scientific staff. GAPS underwater communication is conducted by using various frequencies, interferences with simultaneously operating Echo Sounders are possible. Attention: Submarine cable must be connected and device must be submerged in water before activating GAPS. |
Summary
| Sensorweb integration |
|---|
| urn | vessel:heincke:gaps |
|---|
| contenttype | Summary |
|---|
|
The Global Acoustic Positioning System (GAPS) combines an ultra-short baseline (USBL) acoustic positioning system and an inertial navigation system (INS) in the same housing to provide accurate position of any subsea object supplied with a transponder. Operating range is up to 4000m water depth with accuracy 0.2 percent of the distance to the object. The registration angle of 200 degree also enables position registration in shallow water. |
| Sensorweb integration |
|---|
| urn | vessel:heincke:gaps |
|---|
| contenttype | Metadata |
|---|
|
| Manufacturer | iXblue |
|---|
| Model | OIGAPS-Carbone |
|---|
| Serial No. | n/a |
|---|
| Type | ultra short baseline positioning systems |
|---|
|
...
| urn | vessel:heincke:gaps |
|---|
| contenttype | Images |
|---|
 Image Removed
Image Removed  Image Removed
Image Removed  Image Removed
Image Removed  Image Removed
Image Removed  Image Removed
Image Removed  Image Removed
Image Removed  Image Removed
Image RemovedMost of the scientific activities can only be carried out with the usage of winches. Therefore the winches are among the most important devices onboard. The winch concept aims to redundancy and flexibility. Smooth operation is overseen by the ship's engineers. |
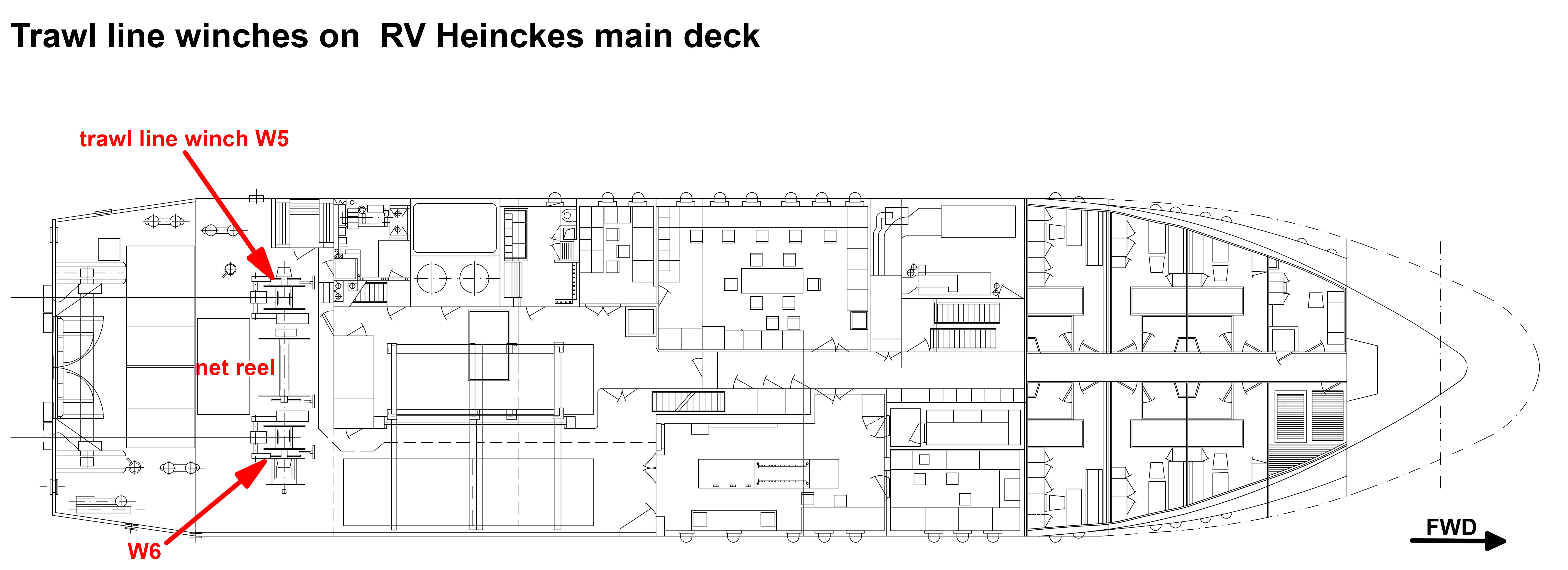 Image Added
Image Added
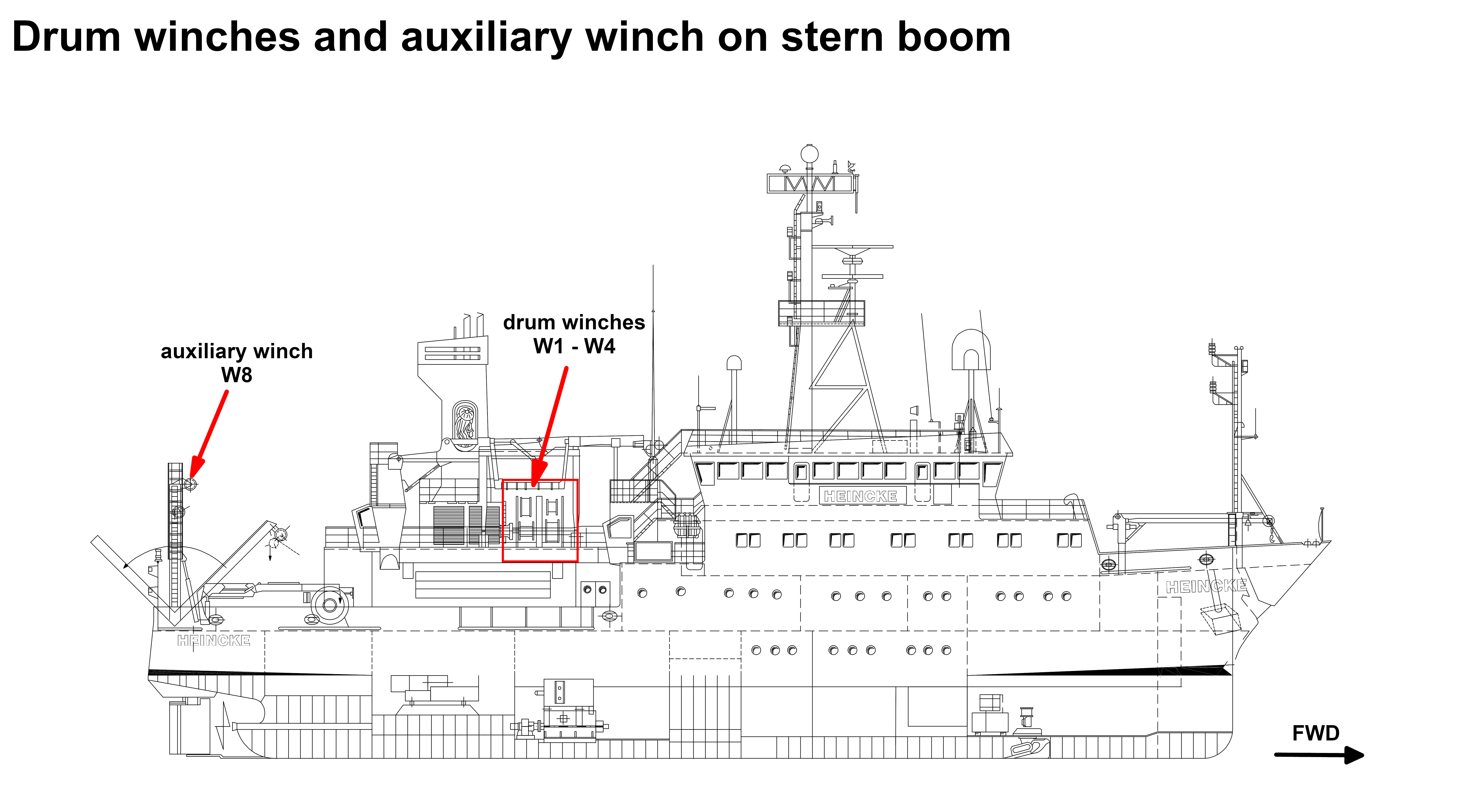 Image Added
Image Added
Transducer Frequency:
...
...
Contacts
| Sensorweb integration |
|---|
| urn | vessel:heincke:gaps |
|---|
| contenttype | Contacts |
|---|
|
| Name | Institution | Role |
|---|
| Ralf Krocker | Alfred-Wegener-Institute for Polar and Marine Research | Engineer In Charge |
|
Components
The system consists of the GAPS antenna itself, mounting for installation at the ships bottom, the Easy Connect Box (ECB) and monitoring software "GAPS MMI - Man Machine Interface". The transponders can be mounted to winch wire or to a submarine vehicle or other submarine object.
...
| Sensorweb integration |
|---|
| urn | vessel:heincke:gaps |
|---|
| contenttype | Subdevices |
|---|
|
No subdevices found for this sensor. |
Position
| Sensorweb integration |
|---|
| urn | vessel:heincke:gaps |
|---|
| contenttype | LocalFrame |
|---|
|
| Origin Description: | Electronics of the GAPS system are located in the server rack in the Mess- and Registrierraum and software is installed on the CTD-PC. The GAPS is deployed via the Hydrographenschacht. |
|
Data logging, storage and archiving
Logged parameters
| Sensorweb integration |
|---|
| urn | vessel:heincke:gaps |
|---|
| contenttype | Parameters |
|---|
|
| Parameter | Sensor Output Type | Unit |
|---|
| heading | attitude | degree | | latitude | latitude | degree | | longitude | longitude | degree | | altitude | attitude | m | | roll | attitude | degree | | pitch | attitude | degree | | transponder number | index | unknown | | x-coordinate | distance | m | | y-coordinate | distance | m | | z-coordinate | distance | m | | depth | depth | m | | month | date and time | unknown | | time in hours | date and time | unknown | | year | date and time | unknown | | day | date and time | unknown |
|
Central geographical ship's position and time standard
| Metadata (Metadata Plugin) |
|---|
|
Time synchronising of the PC with MMI-Software via Windows-Domain-Affiliation. Centering of GPS-antenna position to GAPS and to transponders. |
Rawdata storage on board
| Metadata (Metadata Plugin) |
|---|
|
Data storage in DShip system.
|
DShip
| Metadata (Metadata Plugin) |
|---|
|
Uncorrected measurement data. |
| Metadata list |
|---|
|| Device name | GAPS ||
|| Parameters| Transponder2; Transponder3; Transponder1; Ship0; Altitude std dev; GAPS.HEHDT.Sentence; GAPS.PIXSE.ATI.datafield01; GAPS.PIXSE.ATI.datafield04; GAPS.PIXSE.STDH.datafield01; GAPS.PIXSE.STDP.datafield01; Heading \[deg\]; Heading std dev; Latitude std dev; Longitude std dev; Pitch \[deg\]; Pitch std dev; Roll \[deg\]; Roll std dev ||
|| Transponder Parameter| Day; Depth \[m\]; EW; Month; NS; Time; Transponder No SAG; Transponder No SAX; X coordinate \[m\]; Y coordinate \[m\]; Year; Z coordinate \[m\] ||
|| Ship0 Parameter| Day; Depth \[m\]; EW; GAPS.PTSAG.0.Latitude; GAPS.PTSAG.0.Longitude; Month; NS; Time; Transponder_No_SAG;Transponder_No_SAX; X_coordinate \[m\]; Y_coordinate \[m\]; Year; Z_coordinate \[m\] || |
Data archiving on land
| Metadata (Metadata Plugin) |
|---|
|
After the cruise the DShip data set can be extracted from https://dms.awi.de.
|
Documentation
| Sensorweb integration |
|---|
| urn | vessel:heincke:gaps |
|---|
| contenttype | Resources |
|---|
|
|
...