Attention:
Please note that operations of the Sediment Echo Sounder Atlas Parasound P70 requires experienced scientific staff on board for permanent supervision of data aquisition and storage. The system is not operated by the ship's crew. Announce operations with the Sediment Echo Sounder Atlas Parasound P70 to AWI-Logistics prior to the cruise and clarify the data transfer after the cruise.
Summary
The Sediment Echo Sounder surveys the upper layers of the seafloor via the reflection of acoustic signals. Depending upon the reflectivity of the sediments penetration depths of about 200m can be reached.
vessel:polarstern:parasound_p70 (1392)
| Manufacturer | Teledyne RESON (ATLAS Hydrographic before takeover) |
|---|---|
| Model | Parasound P70 |
| Serial No. | n/a |
| Type | echo sounder |

Transducer Frequency
Contacts
| Name | Institution | Role |
|---|---|---|
| Catalina Gebhardt | Alfred-Wegener-Institute for Polar and Marine Research | Principal Investigator |
| Gerhard Kuhn | Alfred-Wegener-Institute for Polar and Marine Research | Data Scientist |
| Frank Niessen | Alfred-Wegener-Institute for Polar and Marine Research | Data Scientist |
| Alfred Wegener Institute for Polar and Marine Research | Alfred Wegener Institute, Helmholz Centre for Polar and Marine Research | Owner |
Components
The transducer consists of four segments and is mounted without ice protection window in the box keel. The transducer transmits in the frequency range of 18 - 39 kHz and reaches water depth of 10 to 11000m. Frequency interferences generate "parametric low frequencies" between 0.5 and 6.0 kHz. Penetration depth into the sediment accounts for > 200m (depending on sediment properties) and the resolution is 6.1 cm.
Position
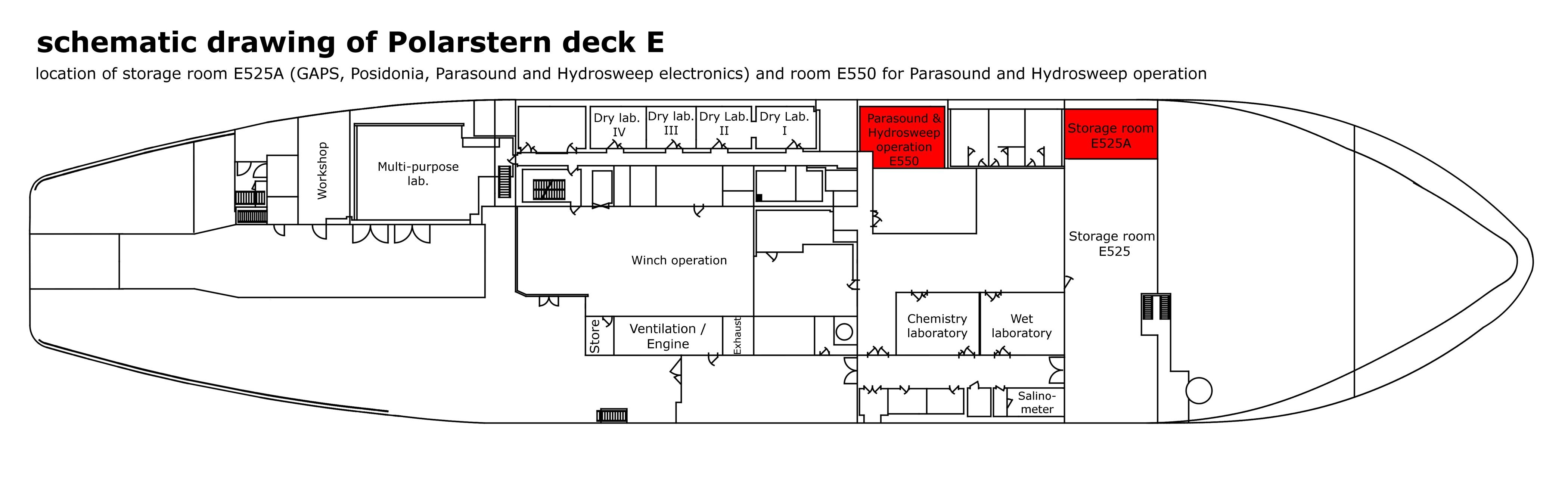
| Info | xyz-position calculated from Alignment Survey Report (2016), transducer array located in box keel, electronics located in E525A, computers located in E550 (HSPS room) |
| X | 76.498 m (X-0 is at the center of der rudder (ref. design drawing of the vessel), positive X-axis is forward and along vessel centerline) |
| Y | 0.004 m (Y-0 at centerline, positive Y-axis is portside ) |
Data logging, storage and archiving
Logged parameters
| Parameter | Sensor Output Type | Unit |
|---|---|---|
| depth | depth | m |
Central geographical ship's position and time standard
The recorded geographical ship's position is the location of the central motion sensor MINS. The lever between transducer and the central motionsensor MINS is considered.
Rawdata storage on board
root directory |
R:\data01\parasound| |
|---|---|
directory name |
CruiseNo\XXX_ASD_YYYYMMDD |
file name |
PS3XXX_YYYY-MM-DDThhmmssZ_<identNo>.asd.acf |
Data volume (MB per day) ca |
10000 |
Number of files per day ca |
1000 |
Dship
Device name |
parasound |
|---|---|
Parameters |
depth [m] |
Data archiving on land
File format(s) |
stored in PANGAEA or DShip system |
|---|---|
Calibration certificates |
NO |