...
| Sensorweb integration |
|---|
| urn | vessel:heincke:heem712pu_em712sn10071 |
|---|
| contenttype | Summary |
|---|
|
Multibeam EM712 is a high-resolution seafloor mapping system. It is suitable for water depths up to 2000m depending on the configuration of the transducers. Maximum ping rate is 30Hz and maximum fan width 140° and depth resolution 1cm. Data from the water column may also be stored. |
...
| Sensorweb integration |
|---|
| urn | vessel:heincke:heem712pu_em712sn10071 |
|---|
| contenttype | Metadata |
|---|
|
| Manufacturer | Kongsberg Maritime AS |
|---|
| Model | 405125 |
|---|
| Serial No. | 10071 |
|---|
| Type | multi-beam echosounder |
|---|
| SENSOR-Link | ↪ |
|---|
|
Transducer Frequency
| Metadata (Metadata Plugin) |
|---|
|
40 - 100 kHz |
...
| Sensorweb integration |
|---|
| urn | vessel:heincke:heem712pu_em712sn10071 |
|---|
| contenttype | Contacts |
|---|
|
| Name | Institution | Role |
|---|
| FIELAX GmbH | FIELAX Gesellschaft für wissenschaftliche Datenverarbeitung mbH | Engineer In Charge |
|
Components
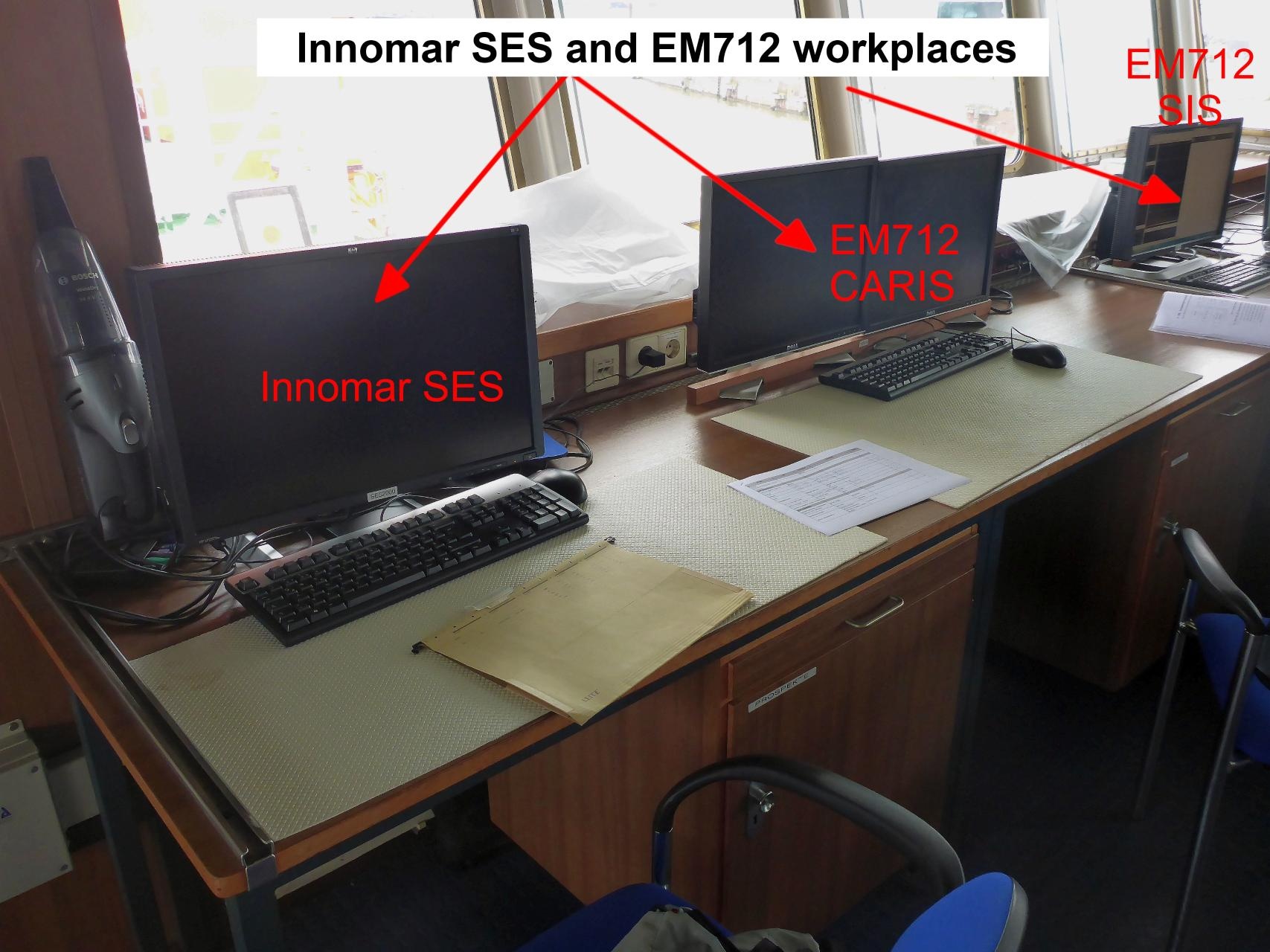
The EM712 consists of a transducer array for transmitting (Tx) and an array for receiving (Rx), the transceiver unit, the data aquisition PC with the aquisition software SIS and two processing PCs (bridge and Messraum) with the software Caris HIPS/SIPS.
...
| Sensorweb integration |
|---|
| urn | vessel:heincke:heem712pu_em712sn10071 |
|---|
| contenttype | Subdevices |
|---|
|
| Name | Model | Serial Number | SENSOR-
Link |
|---|
| Simrad EM712 Rx array |
| 104 | ↪ | | Simrad EM712 Tx array |
| 171 | ↪ |
|
Position
| Sensorweb integration |
|---|
| urn | vessel:heincke:heem712pu_em712sn10071 |
|---|
| contenttype | LocalFrame |
|---|
|
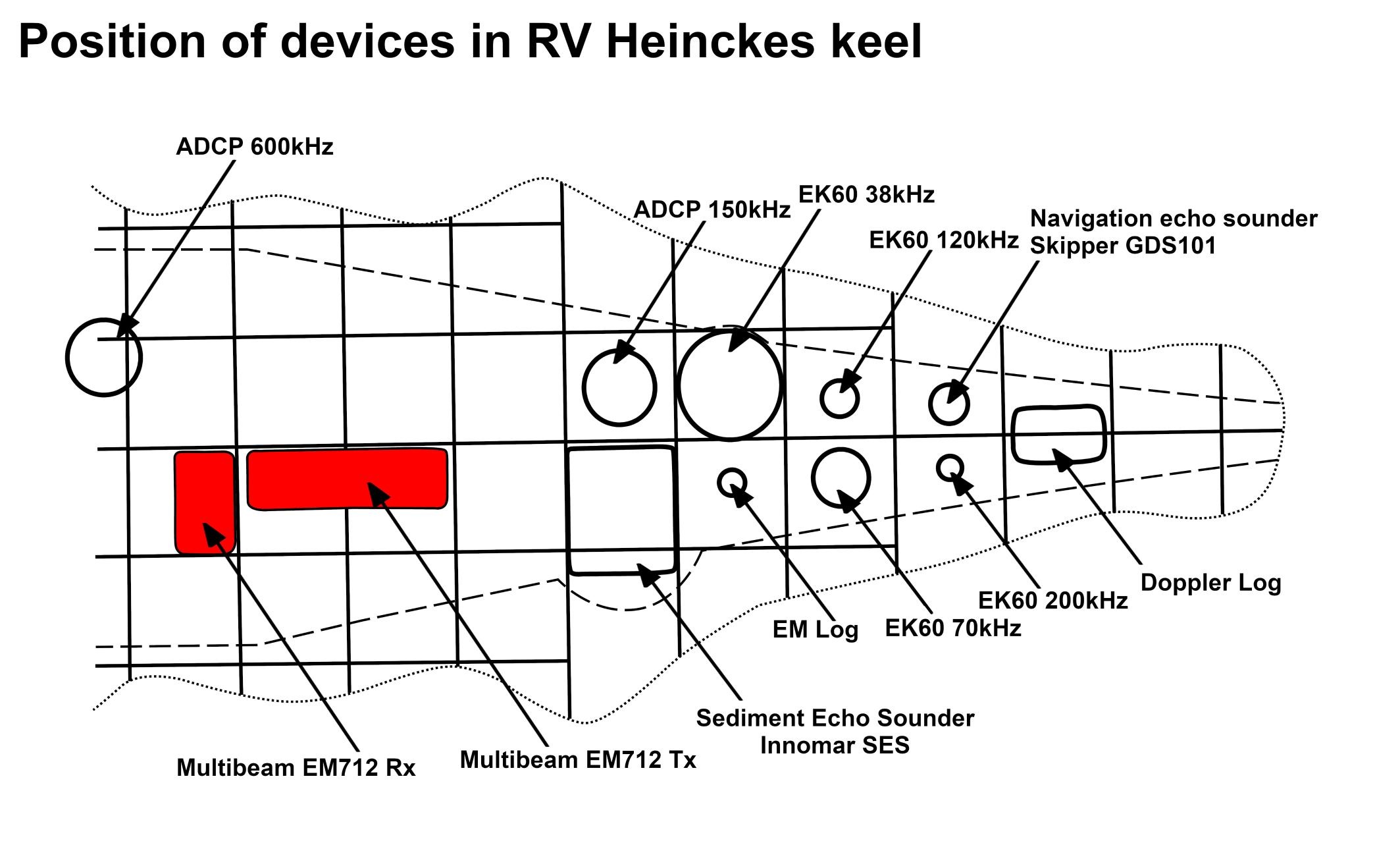
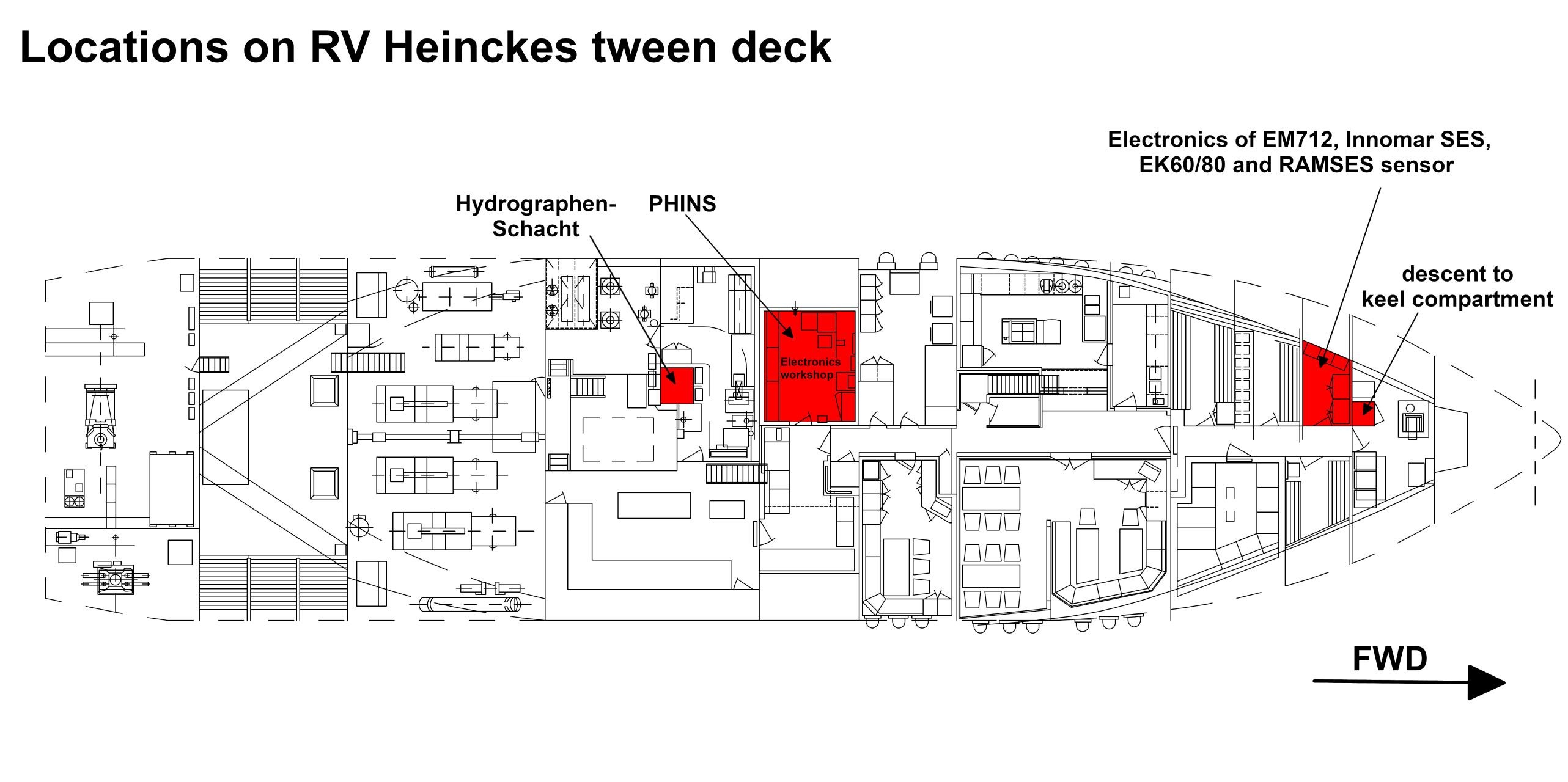
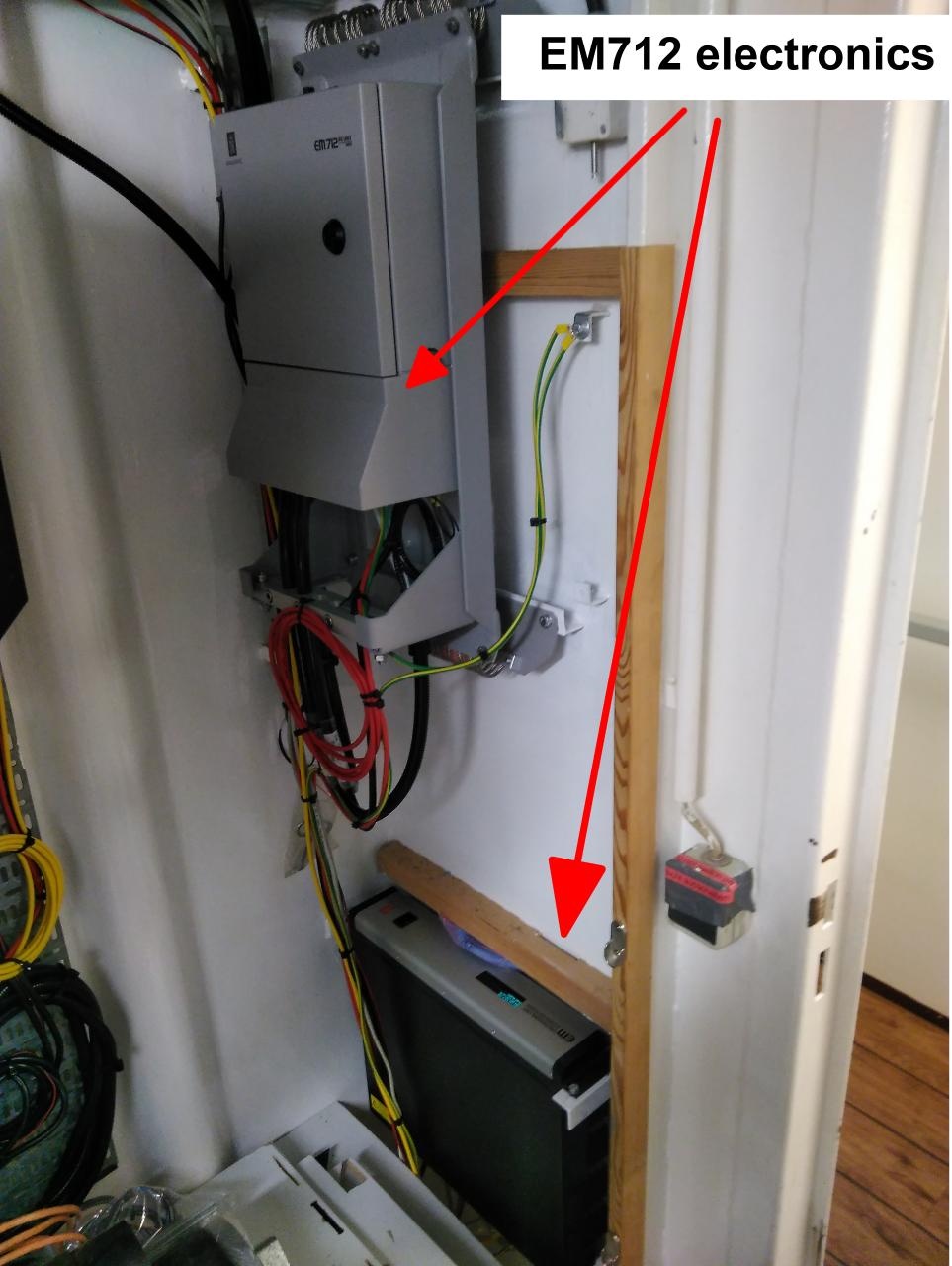
| Info | The system consists of several units. Transducer arrays are installed in the keel of RV Heincke. Electronics are found in the Lotgeraeteraum. Work places are situated on the bridge and in the Messraum. |
|
Data logging, storage and archiving
...
| Sensorweb integration |
|---|
| urn | vessel:heincke:heem712pu_em712sn10071 |
|---|
| contenttype | Parameters |
|---|
|
| Parameter | Sensor Output Type | Unit |
|---|
| depth | depth | m |
|
Central geographical ship's position and time standard
| Metadata (Metadata Plugin) |
|---|
|
The GPS position of the Trimble GPS receiver antenna is stored in the data files. The position is NOT centralized to the SES2000 transducers. Heave correction between the motion sensor and the transducer are calculated in the motion sensor and corrected values are transferred to the SES2000. Time synchronisation is achieved via NTP. Centralization of the GPS position to the transducer is achieved by SIS software. GPS antenna position and transducer position related to the motion sensor position as a reference point are stored in the data files. Pay attention that in case of failure of the Trimble GPS sensor the Saab GPS sensor may be used as the reference GPS source. Please contact the bridge staff for information about the GPS receiver in use. Heave correction values are only available for the Trimble GPS receiver. Heave correction between the motion sensor and the transducer is calculated
in the EM712 transceiver unit. UTC time synchronisation of the transceiver unit is achieved via GPS with PPS. The PC is synchronised with UTC via the Windows-Domain-Affiliation to ensure a correct naming of the data files. |
...
| Sensorweb integration |
|---|
| urn | vessel:heincke:heem712pu_em712sn10071 |
|---|
| contenttype | Resources |
|---|
|
|