...
| Sensorweb integration | ||||
|---|---|---|---|---|
| ||||
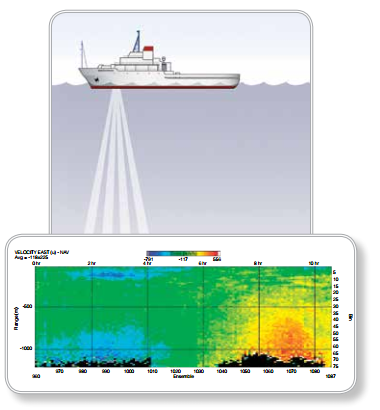
The Acoustic Doppler Current Profiler (ADCP) measures flow rates in the water body below the moving vessel up with an operating frequency of 150 kHz. Up to 400m range . Operation frequency is 150 kHzcan be achieved according to the data sheet. |
| Sensorweb integration | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||
|
| Sensorweb integration | ||||
|---|---|---|---|---|
| ||||
      |
Transducer Frequency:
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
150 kHz |
...
| Sensorweb integration | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| |||||||||
|
Components
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
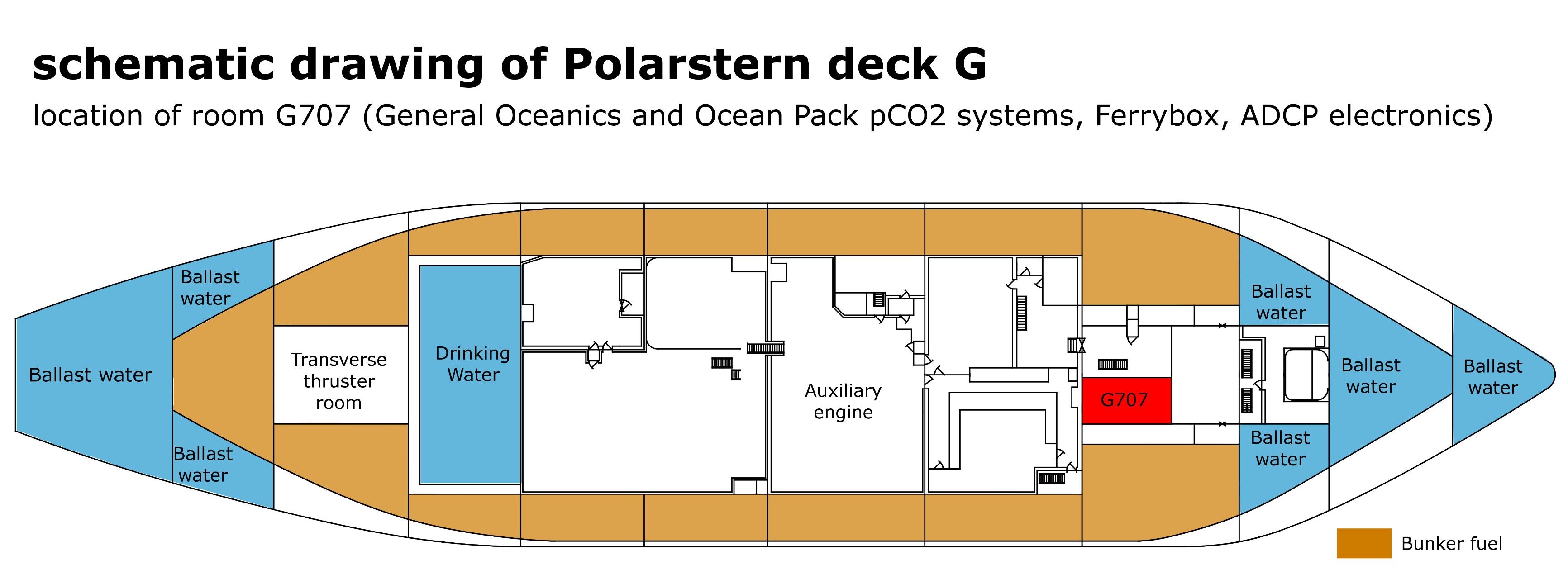
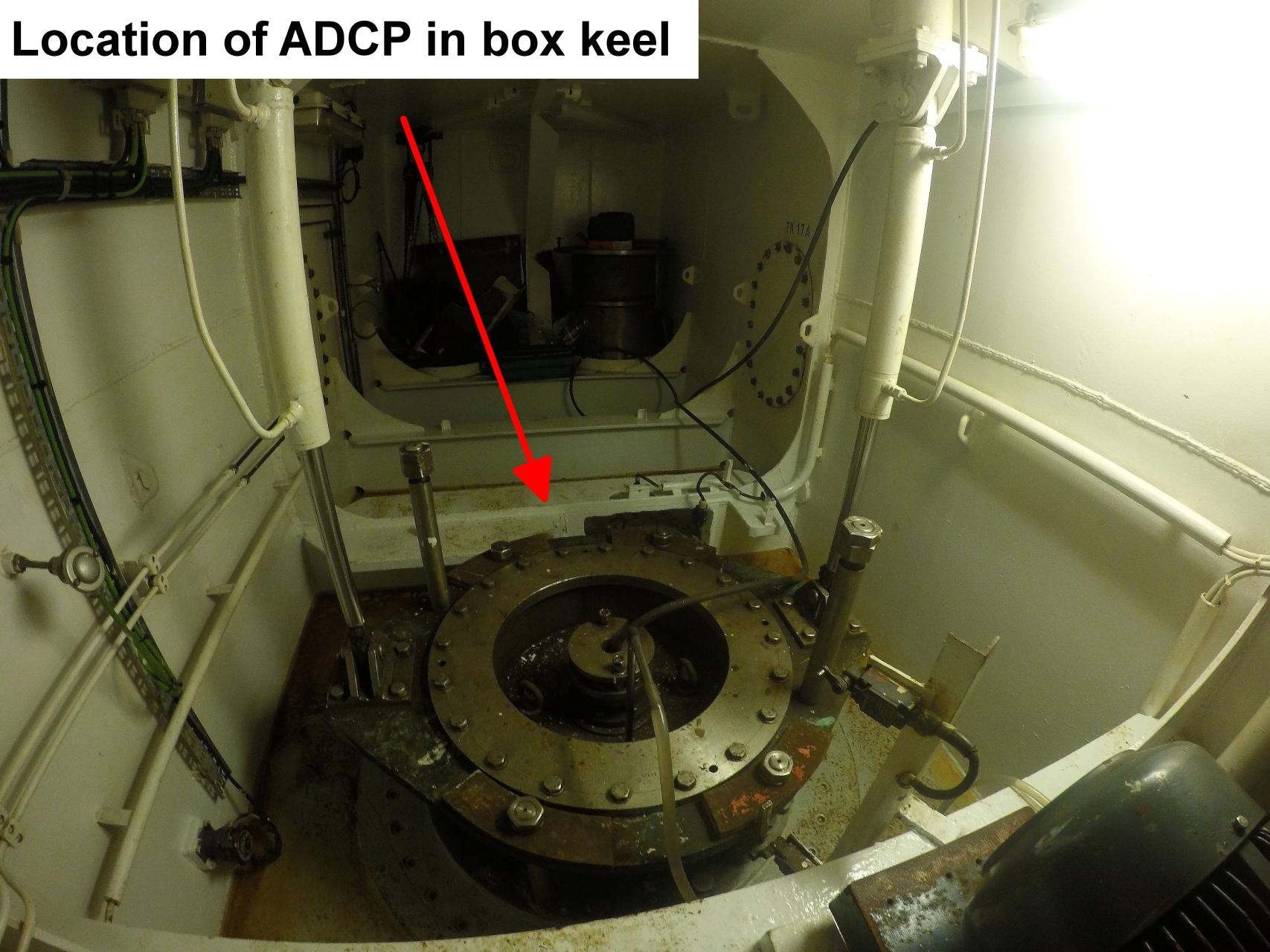
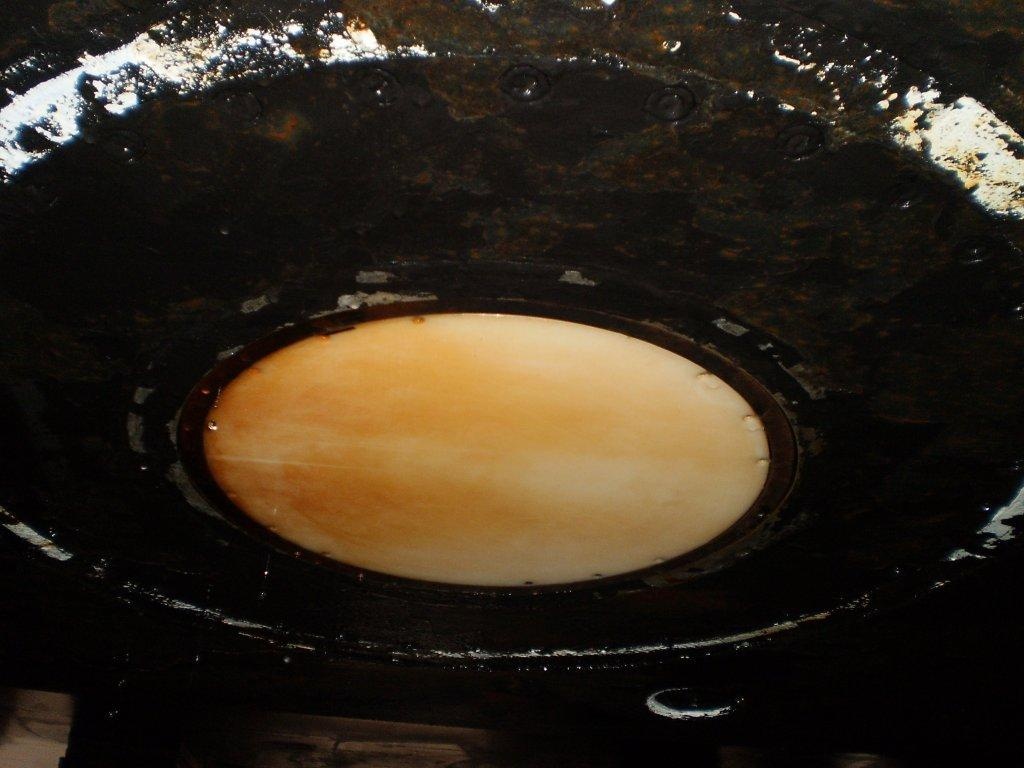
The system consits of the transducer, the electronic chassis, the computer and the subsidiary display at the winch control station (User). The data acquisition and processing software VmDas and the synchronizing software Easy2Sync are installed on the computer. The 150kHz transducer is mounted behind an ice protection window. The angle between the ship centerline and transducer centerline is 45° direction starboard. |
...
| Sensorweb integration | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| |||||||||||
Origin Description:
|
Data logging, storage and archiving
...
| Sensorweb integration | ||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||||||||||
|
Central geographical ship's position and time standard
...