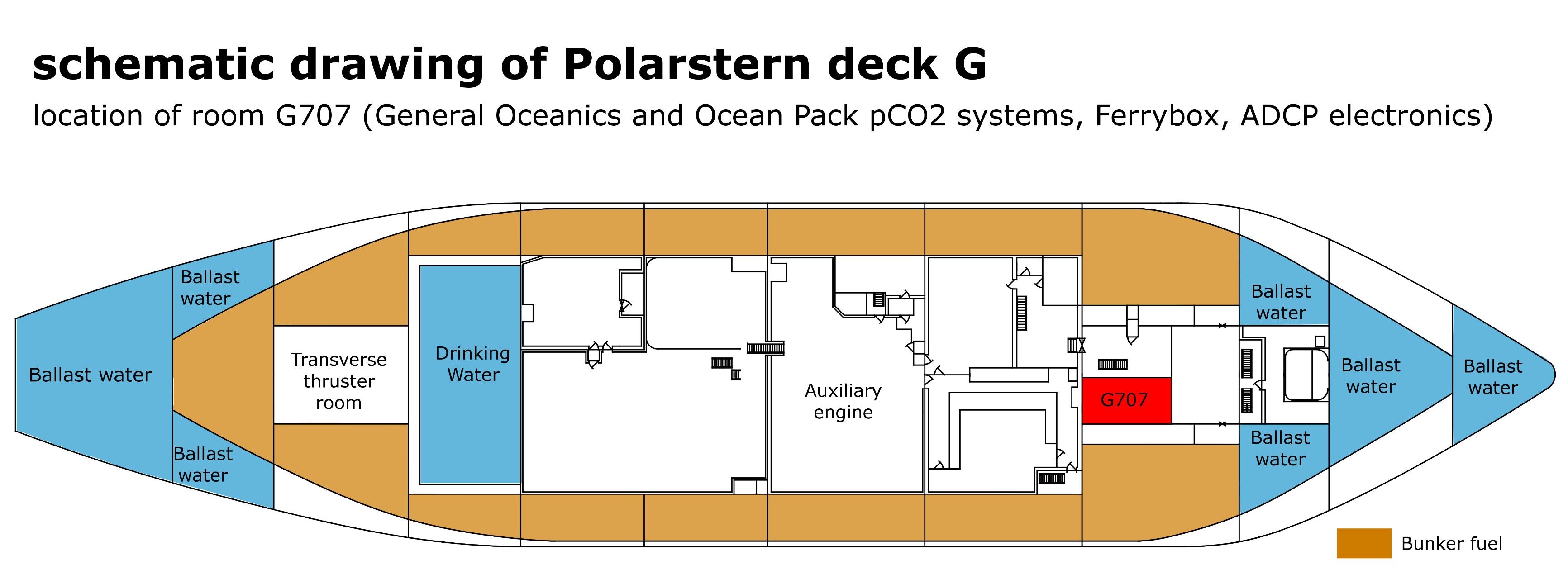
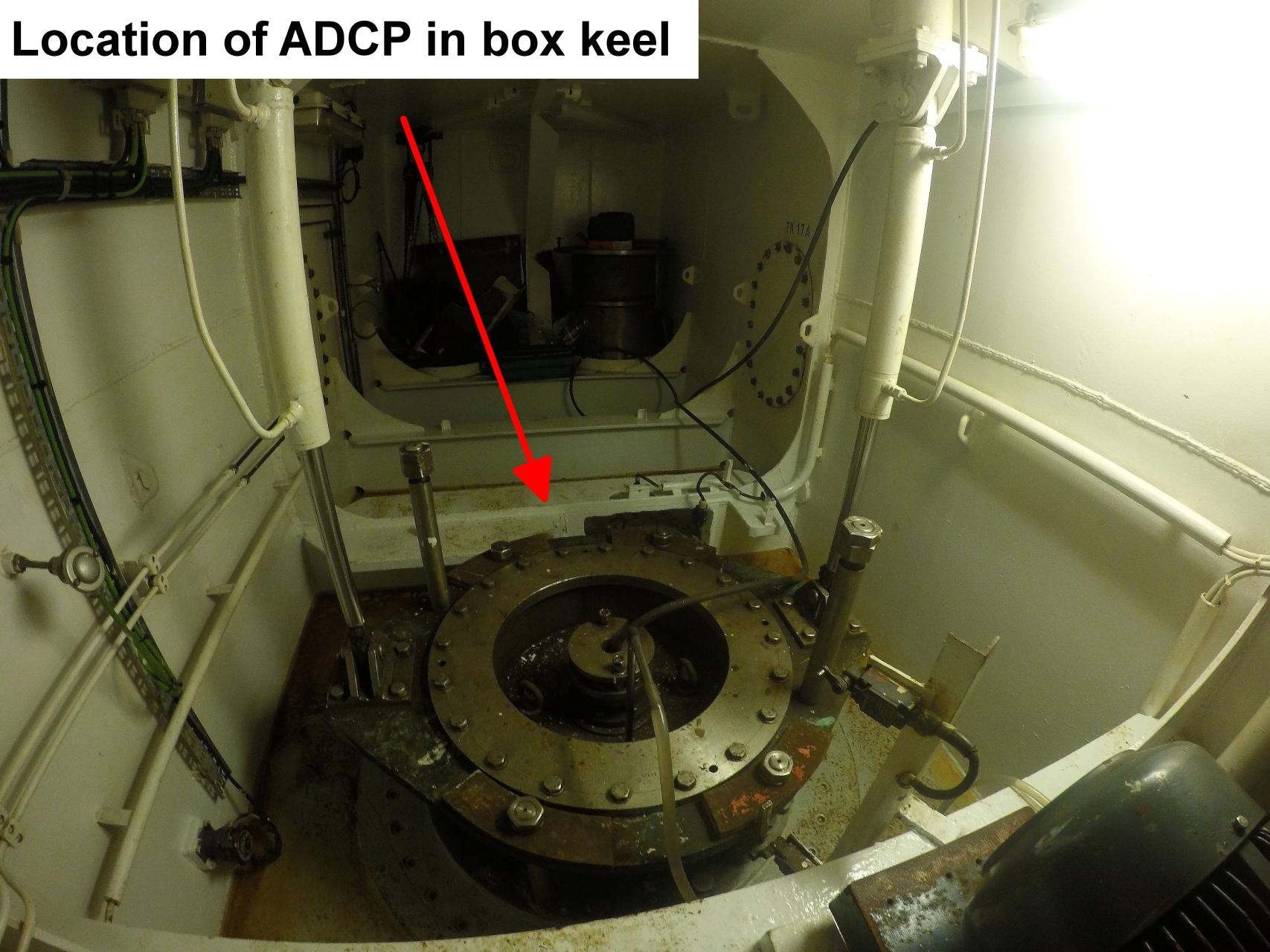
The system consits of the transducer, the electronic chassis, the computer in the echosounder room (G-707) and the subsidiary display at the winch control station (User).
The data acquisition and processing software VmDas and the synchronizing software Easy2Sync are installed on the computer.
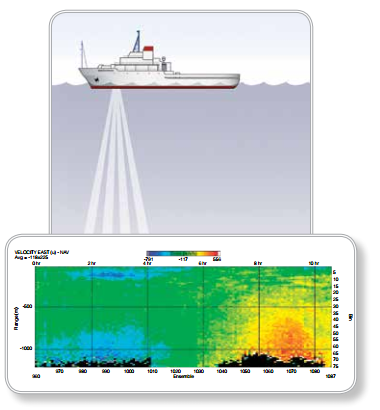
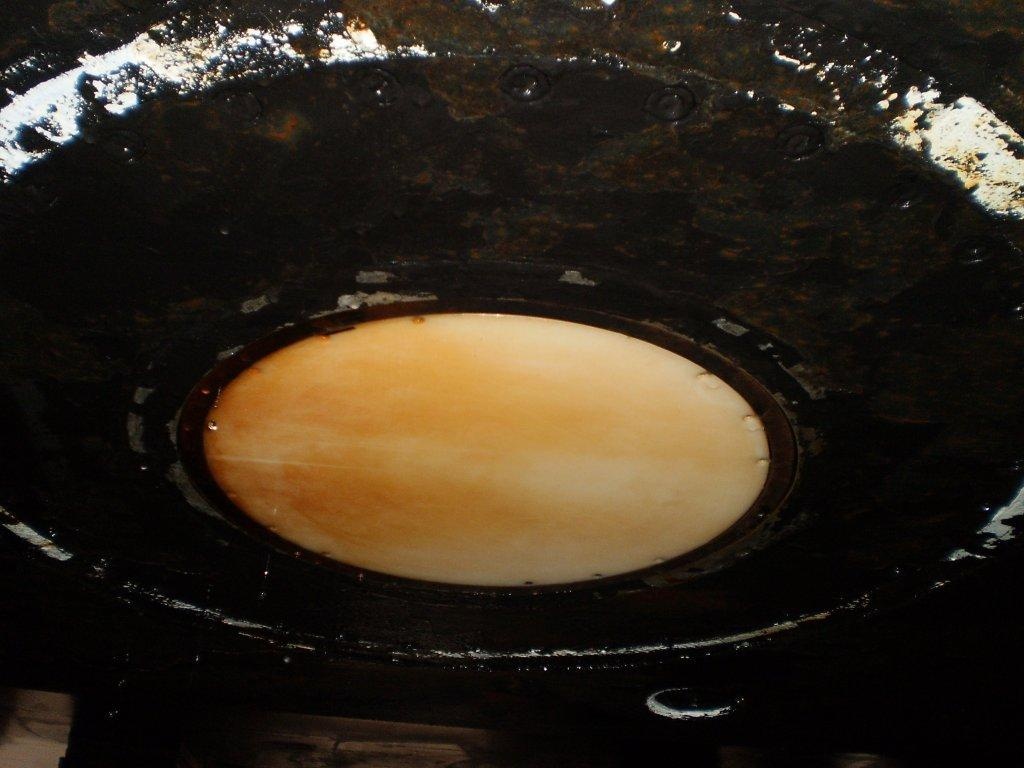
The 150kHz transducer is mounted behind an ice protection window and reaches water depth up to 350m with resolution of 4m ("Cell Size" at 1 to 5 kn ship's speed) and accuracy of about 0.30 m/s for a Single-Ping measurement.
The angle between the ship centerline and transducer centerline is 45° direction starboard. |