| Note |
|---|
|
Please note that operations of the Fishing Echo Sounder Simrad EK 60 / EK 80 requires experienced scientific staff on board and can be only operated on request. The system is not operated by the ship's crew. Request operations with the Fishing Echo Sounder Simrad EK 60 / EK 80 to AWI-Logistics in sufficient time prior to the cruise and clarify the data transfer after the cruise. Data quality of Fishing Echo Sounder Simrad EK 60 / EK 80 is decreased by operating other Echo Sounders. Switch off these Echo Sounders for high data quality. |
Summary
| Sensorweb integration |
|---|
| urn | vessel:heincke:simrad_ek_60___ek_80 |
|---|
| contenttype | Summary |
|---|
|
The sounder operates several frequencies simultaneously thus allowing to detect fish or even plancton in different depths. |
| Sensorweb integration |
|---|
| urn | vessel:heincke:simrad_ek_60___ek_80 |
|---|
| contenttype | Metadata |
|---|
|
| Manufacturer | Kongsberg |
|---|
| Model | Simrad EK 60 / EK 80 |
|---|
| Serial No. | n/a |
|---|
| Type | echo sounder |
|---|
|
| Sensorweb integration |
|---|
| urn | vessel:heincke:simrad_ek_60___ek_80 |
|---|
| contenttype | Images |
|---|
|
|
Transducer Frequency
38, 70, 120 and 200 kHz
| Sensorweb integration |
|---|
| urn | vessel:heincke:simrad_ek_60___ek_80 |
|---|
| contenttype | Contacts |
|---|
|
| Name | Institution | Role |
|---|
| Sören Krägefsky | Alfred-Wegener-Institute for Polar and Marine Research | Data Scientist | | Sören Krägefsky | Alfred-Wegener-Institute for Polar and Marine Research | Editor |
|
Components
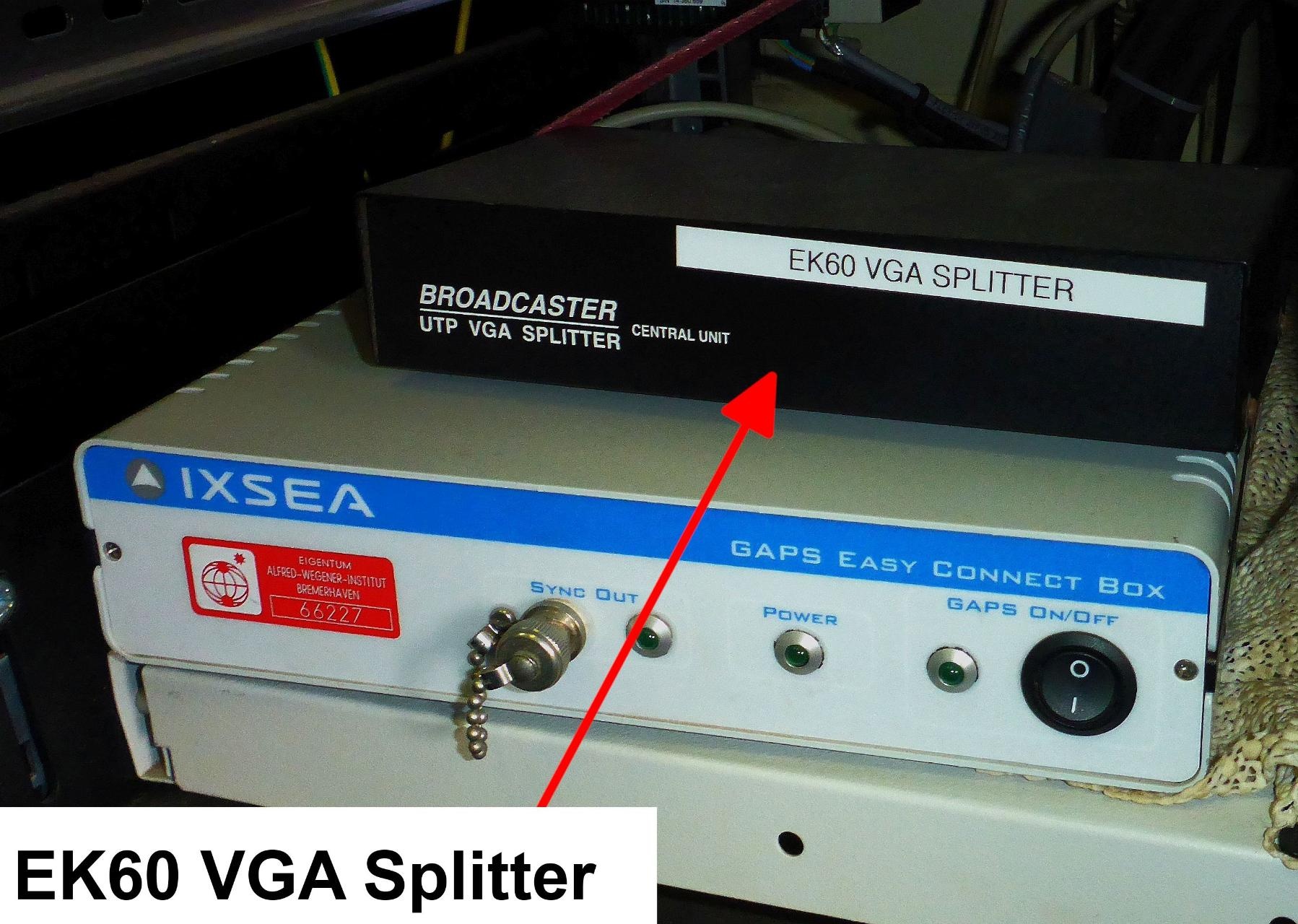
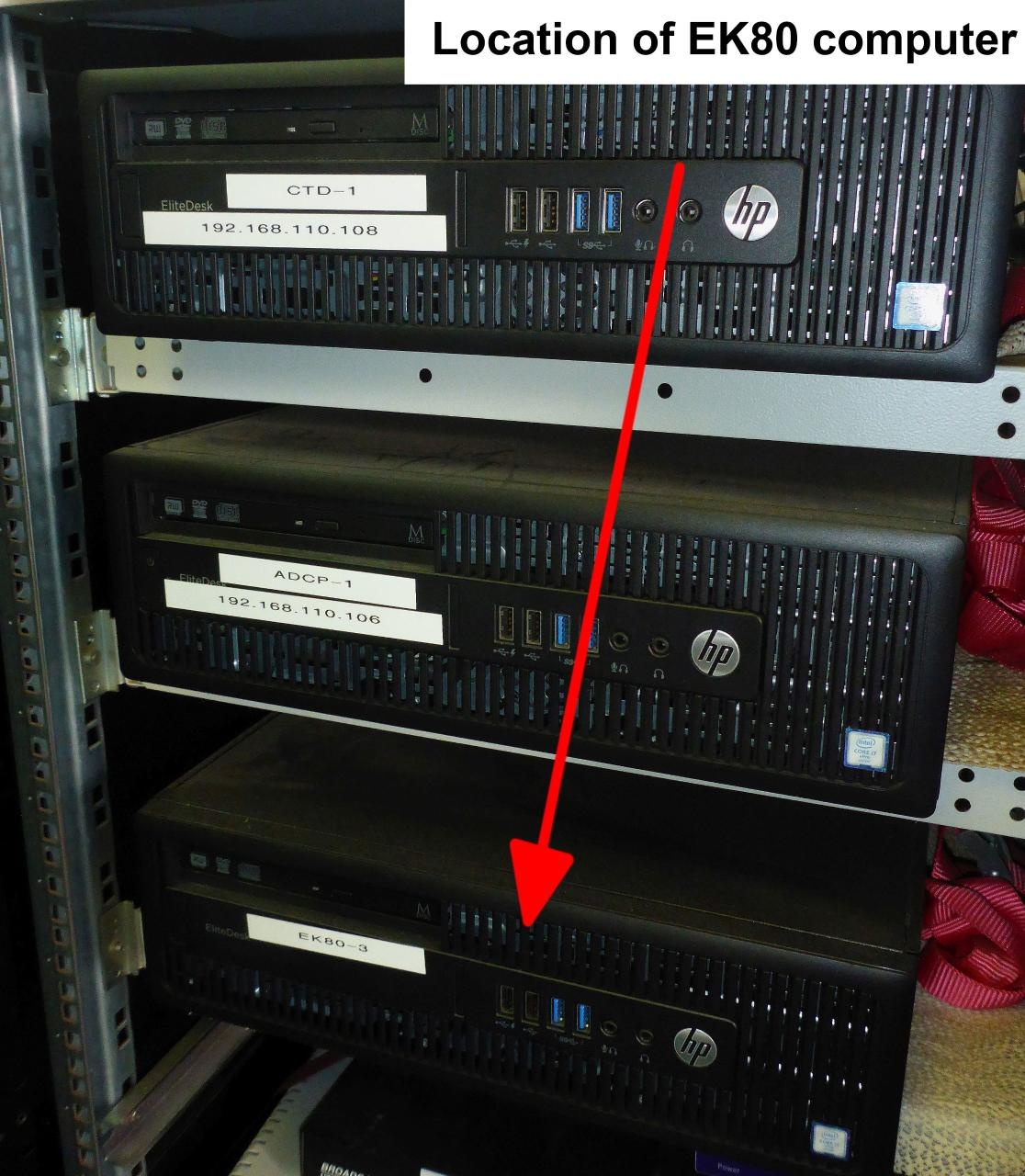
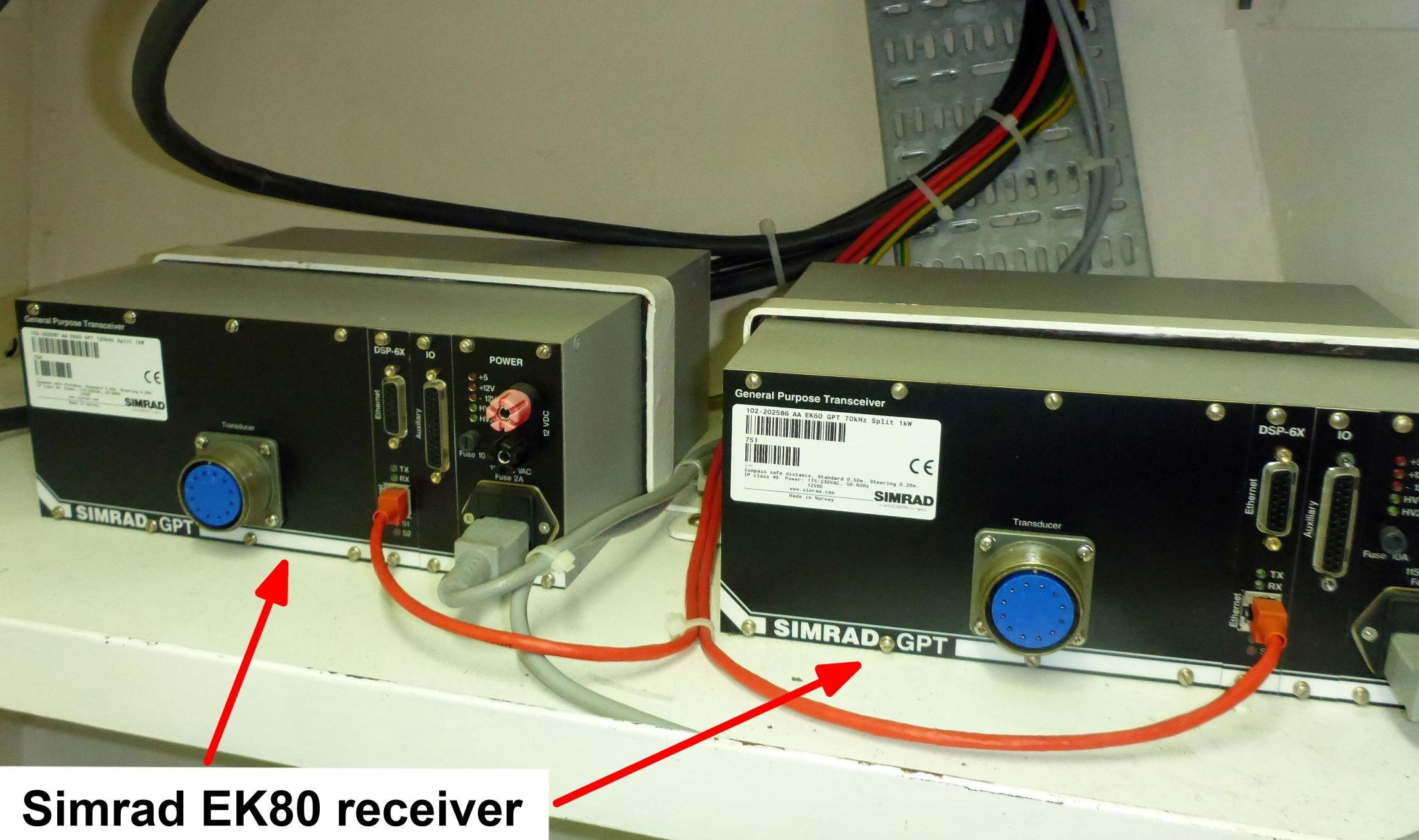
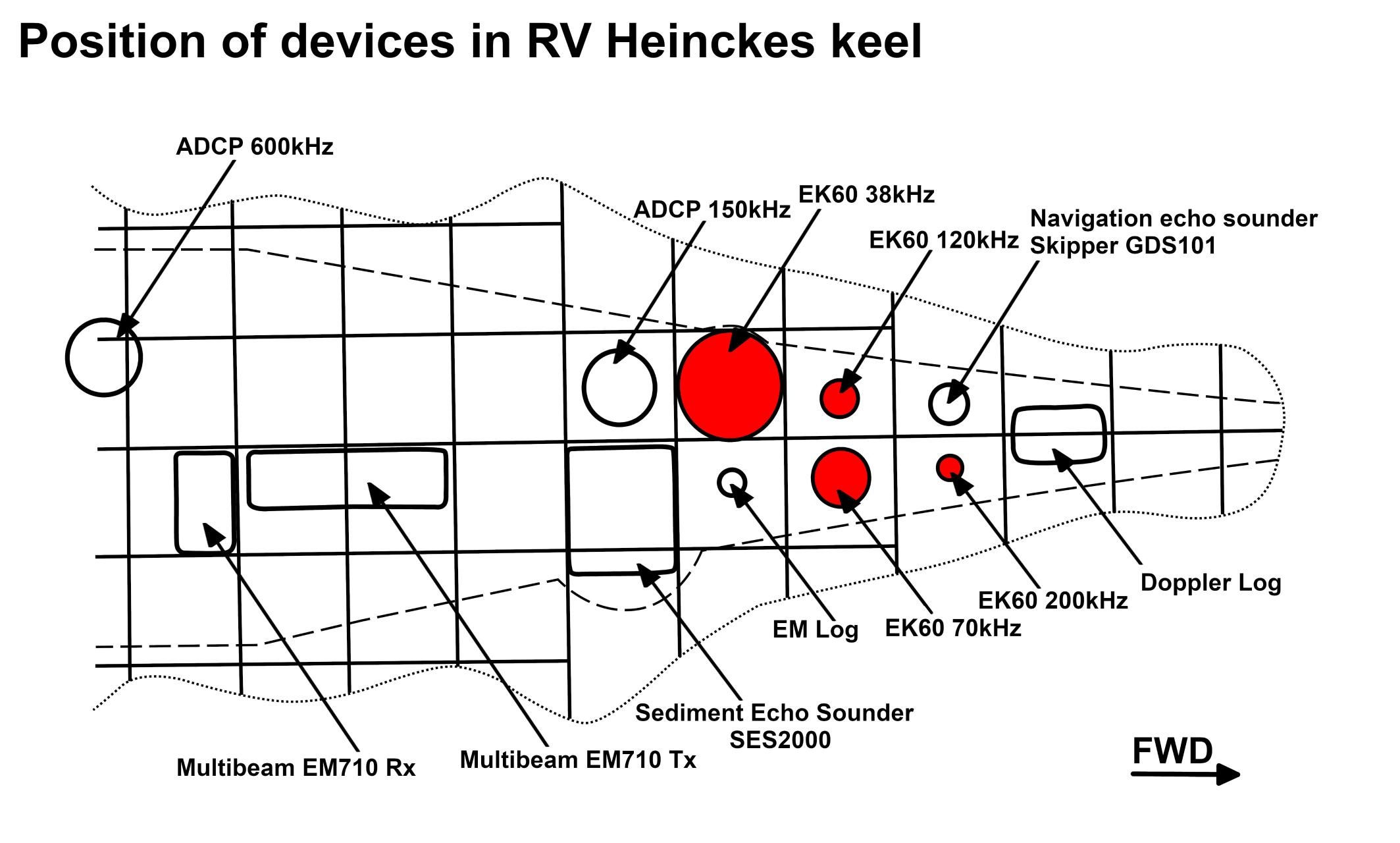
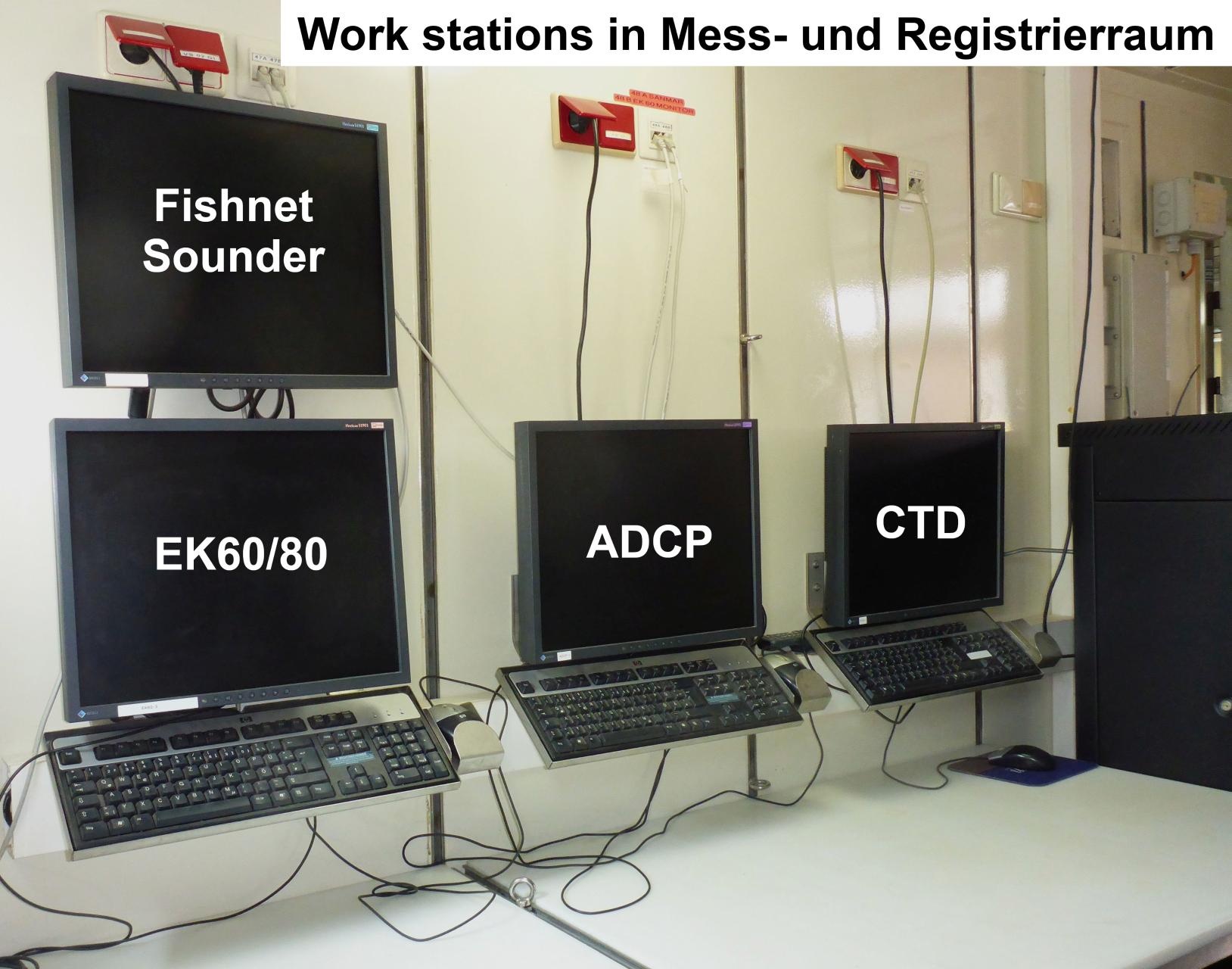
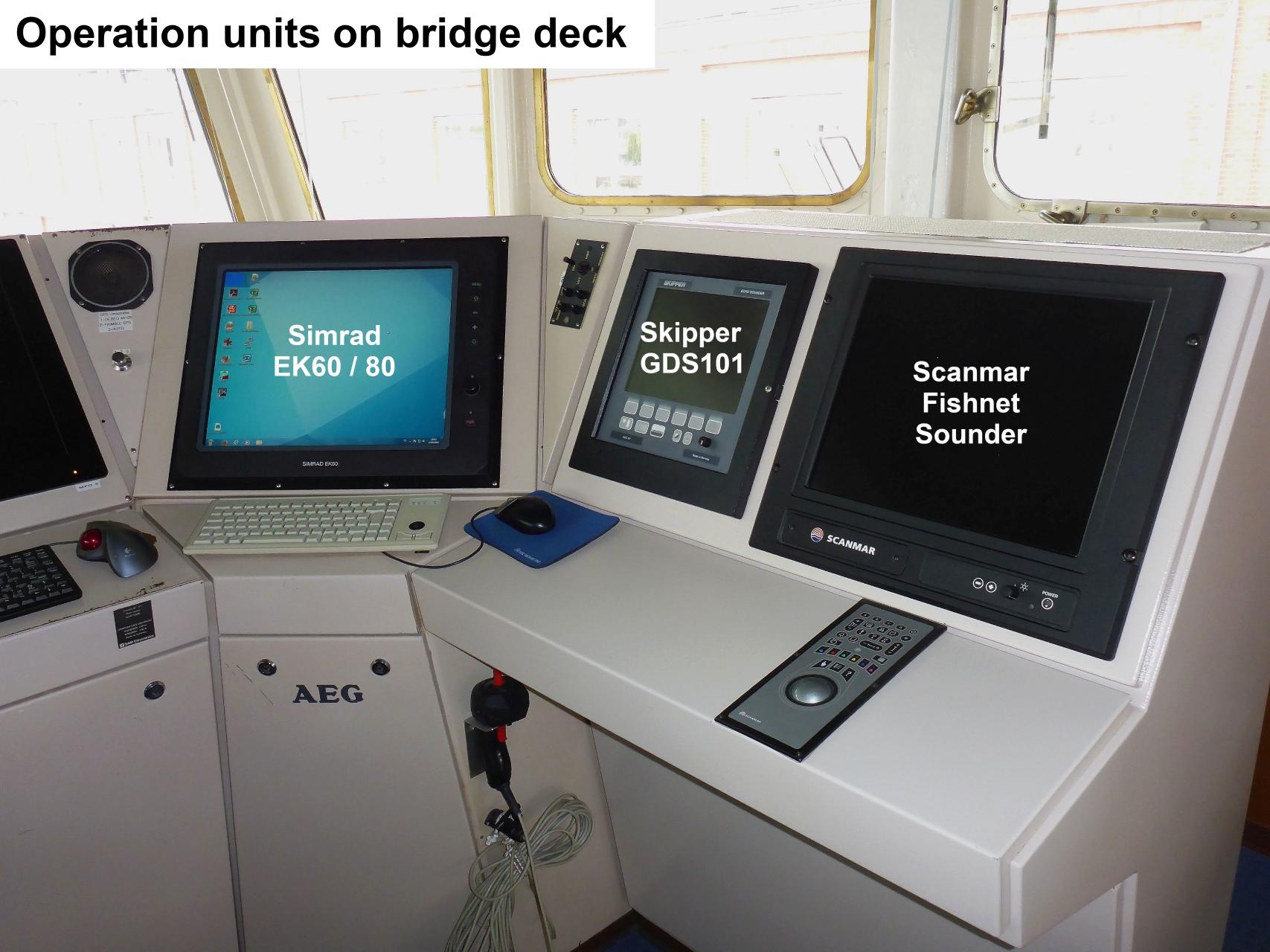
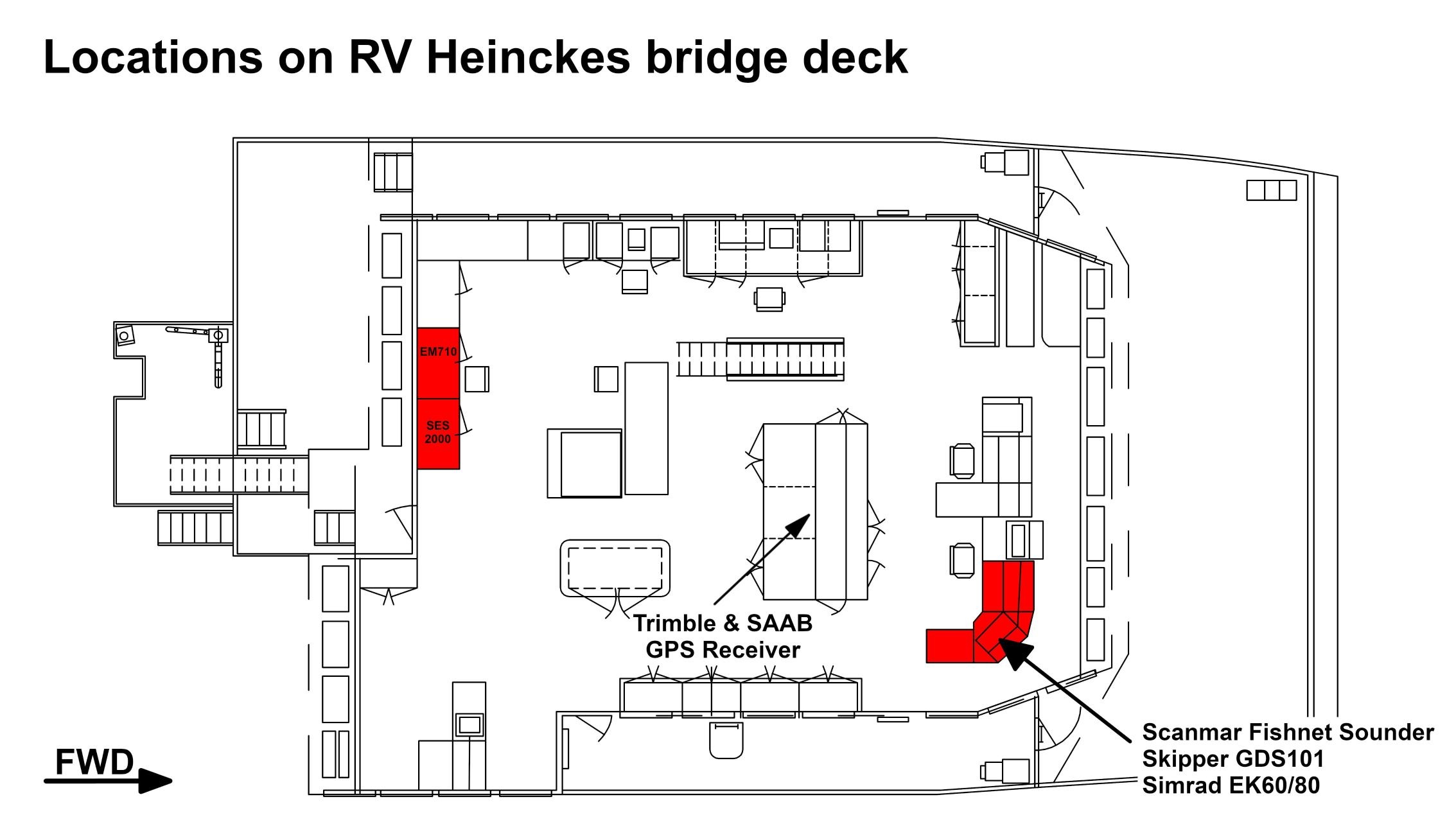
The four split beam transducer ES-38B, ES-70C, ES-120C and ES-200C are installed in the keel of RV Heincke. The transceiver and receiver are situated in the Lotgeraeteraum. Three PCs are available for handling of the EK60/80 on the bridge, in the Messraum and in the dry laboratory. Additionally a display is located in the wet laboratory.
The PCs are equipped with the aquisiton and processing software ER60. For further processing the software "echoview" may be used. A dongle is required for usage of the software. The dongle is NOT permanently stored on the ship. Please contact the responsible person for usage of the dongle in advance of the cruise.
| Sensorweb integration |
|---|
| urn | vessel:heincke:simrad_ek_60___ek_80 |
|---|
| contenttype | Subdevices |
|---|
|
| Name | Model | Type |
|---|
| EK60 120 kHz transducer |
| echo sounder | | EK60 70 kHz transducer |
| echo sounder | | EK60 200 kHz transducer |
| echo sounder | | EK60 38 kHZ transducer |
| echo sounder |
|
Position
| Sensorweb integration |
|---|
| urn | vessel:heincke:simrad_ek_60___ek_80 |
|---|
| contenttype | LocalFrame |
|---|
|
| Origin Description: | The transducer of the Fishing Echo Sounder system are situated in the keel of RV Heincke. Transceiver and receiver are located in the so called Lotgeraeteraum and the computers are stored in the Mess- and Registrierraum. |
|
Data logging, storage and archiving
Logged parameters
| Sensorweb integration |
|---|
| urn | vessel:heincke:simrad_ek_60___ek_80 |
|---|
| contenttype | Parameters |
|---|
|
| Parameter | Sensor Output Type | Unit |
|---|
| depth at different frequencies | depth | m |
|
Central geographical ship's position and time standard
| Metadata (Metadata Plugin) |
|---|
|
NMEA ZDA strings are stored in the data files. The position is NOT centralized to the EK60/80 transducers. The PCs are time synchronised via the Windows-Domain-Affiliation |
Rawdata storage on board
| Metadata (Metadata Plugin) |
|---|
|
Mass data: The data acquisition and processing software ER60 creates rawdata in the mass storage.
|
| Metadata list |
|---|
|| root directory | \\H:\scientists\data\fishsounder\ ||
|| directory name | CruiseNo \\ e.g. \\ HE507 ||
|| file name | CruiseNo-Dyyyymmdd-Thhmmss.raw \\ with: \\ yyyy = year \\ mm = month \\ dd = day \\ hh = hour \\ mm = minute \\ ss = second \\ e.g. \\ HE507-D20090113-T144735.raw ||
|| Data volume (MB per day) ca | 3500 ||
|| Number of files per day ca | 100 || |
DShip
| Metadata (Metadata Plugin) |
|---|
|
Depth information are transferred to DShip only if the system is run in the bottom detection mode. |
| Metadata list |
|---|
|| Device name | Simrad EK_80 ||
|| Parameters | Depth Fathoms (120 kHz) \[F\]; Depth Fathoms (200 kHz) \[F\]; Depth Fathoms (38 kHz) \[F\]; Depth Fathoms (70 kHz) \[F\]; Depth Feet (120 kHz) \[feet \]; Depth Feet (200 kHz) \[feet\]; Depth Feet (38 kHz) \[feet\]; Depth Feet (70 kHz) \[feet\]; Depth Meters (120 kHz) \[m\]; Depth Meters (200 kHz) \[m\]; Depth Meters (38 kHz) \[m\]; Depth Meters (70 kHz) \[m\] || |
Data archiving on land
| Metadata (Metadata Plugin) |
|---|
|
After consultation with the data scientist and AWI Logistics the EK60/80 data including meta data may be transferred to PANGAEA (https://www.pangaea.de/). |
Documentation
| Sensorweb integration |
|---|
| urn | vessel:heincke:simrad_ek_60___ek_80 |
|---|
| contenttype | Resources |
|---|
|
|