| Note |
|---|
|
The system is mandatory for nautical purpose. The operation belongs to the bridge only. |
Summary
| Sensorweb integration |
|---|
| urn | vessel:heincke:gyro |
|---|
| contenttype | Summary |
|---|
|
The NAVIGAT X MK 1 is a digital gyrocompass system for the maritime navigation of vessels. It provides North-speed error corrected true heading data as well as rate of turn (ROT) data for the navigation of maritime vessels. |
| Sensorweb integration |
|---|
| urn | vessel:heincke:gyro |
|---|
| contenttype | Metadata |
|---|
|
| Manufacturer | Sperry Marine |
|---|
| Model | NAVIGAT X MK1 |
|---|
| Serial No. | n/a |
|---|
| Type | compass |
|---|
|
| Sensorweb integration |
|---|
| urn | vessel:heincke:gyro |
|---|
| contenttype | Images |
|---|
|
|
| Sensorweb integration |
|---|
| urn | vessel:heincke:gyro |
|---|
| contenttype | Contacts |
|---|
|
| Name | Institution | Role |
|---|
| Reederei Briese | Reederei Briese | Engineer In Charge |
|
Components
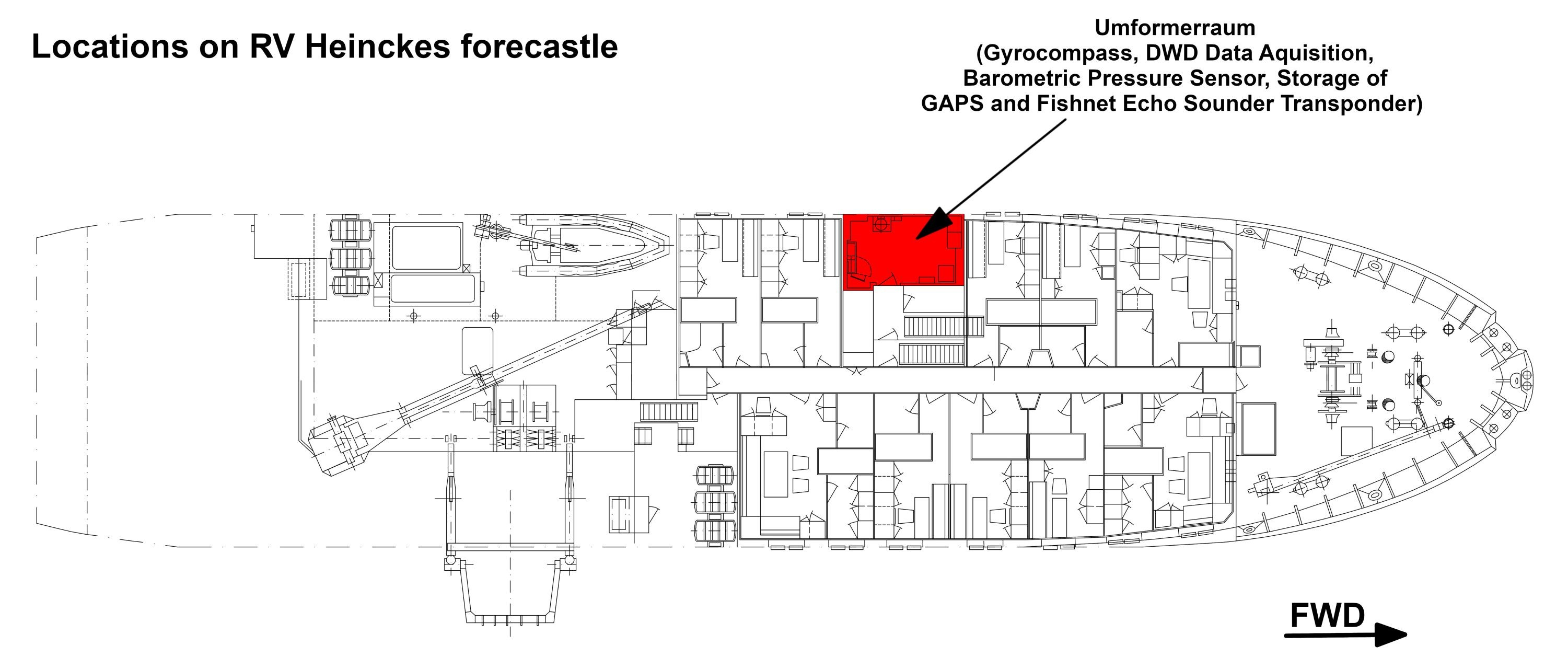
The system consists of the gyro compass installed in Umformerraum in the forecastle.
| Sensorweb integration |
|---|
| urn | vessel:heincke:gyro |
|---|
| contenttype | Subdevices |
|---|
|
No subdevices found for this sensor. |
Position
| Sensorweb integration |
|---|
| urn | vessel:heincke:gyro |
|---|
| contenttype | LocalFrame |
|---|
|
| Origin Description: | The gyrocompass is located in the Umformerraum in the forecastle. |
|
Data logging, storage and archiving
Logged parameters
| Sensorweb integration |
|---|
| urn | vessel:heincke:gyro |
|---|
| contenttype | Parameters |
|---|
|
| Parameter | Sensor Output Type | Unit |
|---|
| gyrocompass heading | attitude | degree |
|
Central geographical ship's position and time standard
System is neither time synchronized nor geographically positioned. This is done by DShip receiving these data for logging.
Rawdata storage on board
Data are logged in DShip.
| Device name | Gyro |
| Parameter | Heading[deg] |
Data archiving on land
After the cruise the DShip data set can be extracted from https://dms.awi.de.
Documentation
| Sensorweb integration |
|---|
| urn | vessel:heincke:gyro |
|---|
| contenttype | Resources |
|---|
|
|