...
| Sensorweb integration |
|---|
| urn | vessel:heincke:phins |
|---|
| contenttype | Metadata |
|---|
|
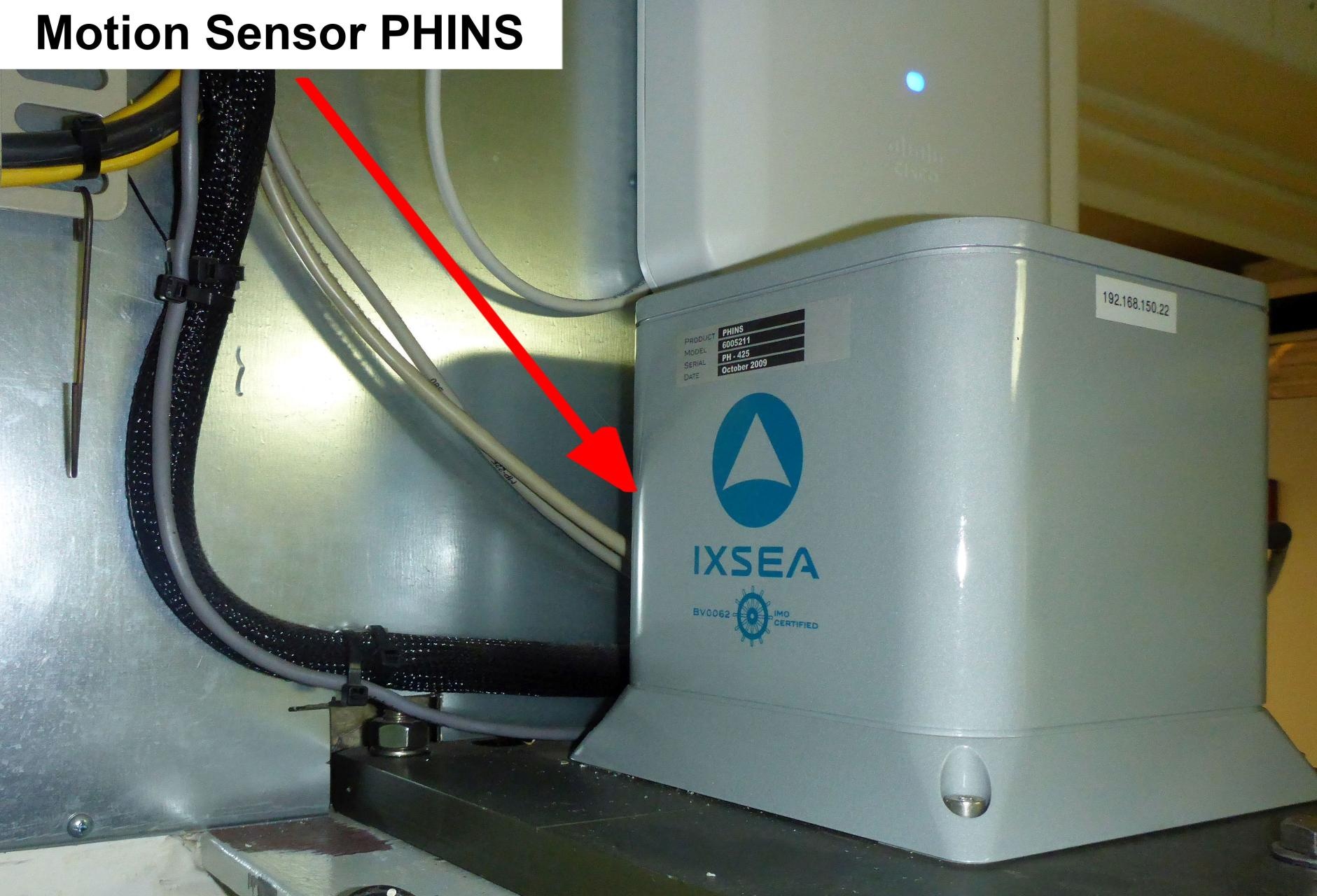
| Manufacturer | iXblue |
|---|
| Model | PHINS |
|---|
| Serial No. | n/a |
|---|
| Type | motion sensor |
|---|
|
| Sensorweb integration |
|---|
| urn | vessel:heincke:phins |
|---|
| contenttype | Images |
|---|
|
|
...
| Sensorweb integration |
|---|
| urn | vessel:heincke:phins |
|---|
| contenttype | Contacts |
|---|
|
| Name | Institution | Role |
|---|
| Peter Gerchow | Alfred-Wegener-Institute | Data Provider | | Ralf Krocker | Alfred-Wegener-Institute for Polar and Marine Research | Engineer In Charge |
|
Components
PHINS system consists of the sensor and the configuration and monitoring software IXRepeater.
...
| Sensorweb integration |
|---|
| urn | vessel:heincke:phins |
|---|
| contenttype | LocalFrame |
|---|
|
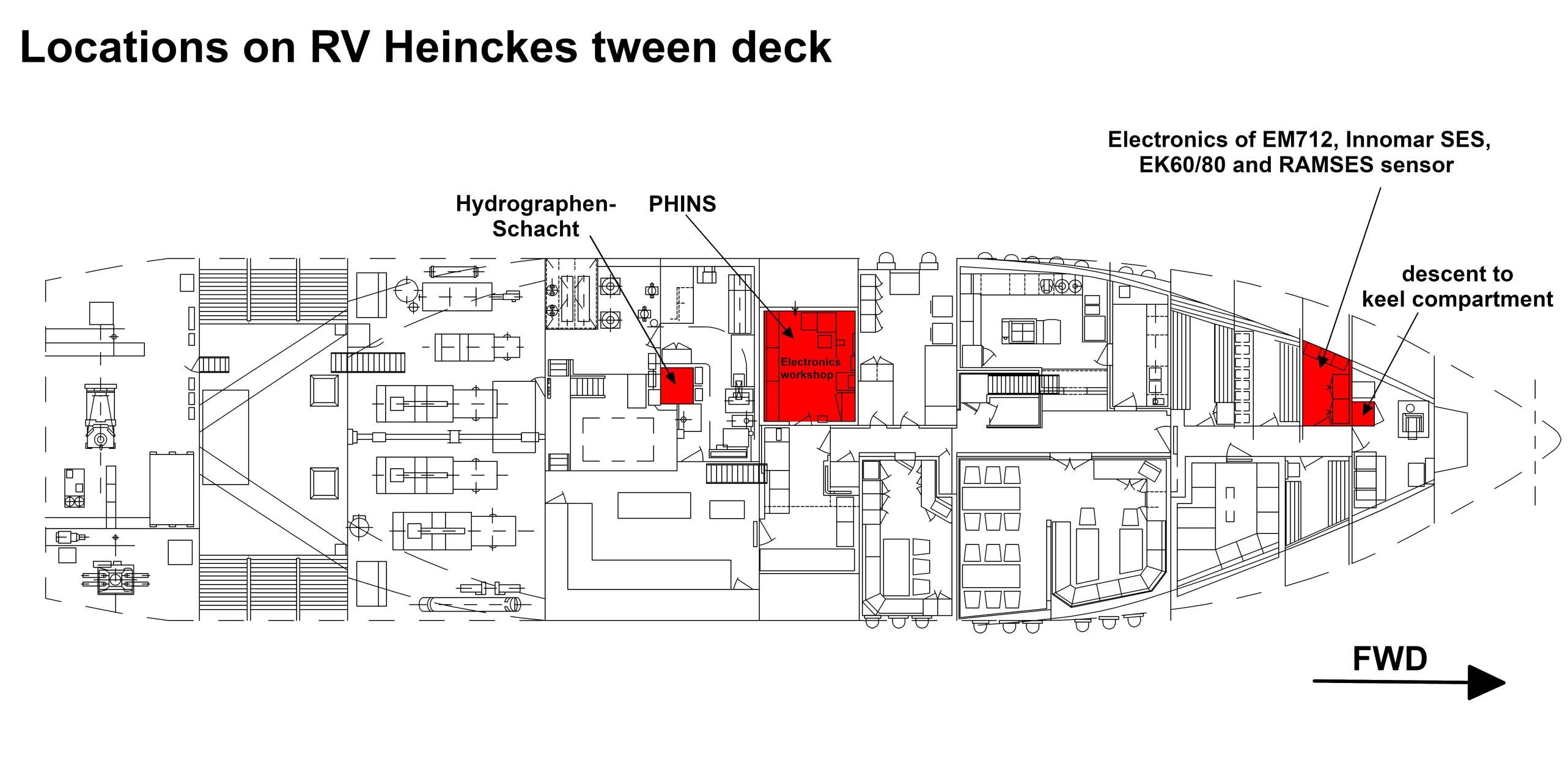
| Origin Description: | xyz-position of PHINS from Alignment Survey Report RV Heincke (January 2016) | | X: | 25.952 m
(Positive X axis is forward and along the centerline of the vessel with X0 at the Stern point of the vessel.) | | Y: | -0.847 m
(Positive Y axis is portside of centerline with Y0 at centerline at the Very stern point of the vessel.) | | Z: | 5.027 m
(Positive Z axis is upwards of basis. Z0 is set to the hydrophone on midship.) |
|
Data logging, storage and archiving
...
| Sensorweb integration |
|---|
| urn | vessel:heincke:phins |
|---|
| contenttype | Parameters |
|---|
|
| Parameter | Sensor Output Type | Unit |
|---|
| heading | attitude | degree | | heave | attitude | m | | latitude | latitude | degree | | longitude | longitude | degree | | pitch | attitude | degree | | roll | attitude | degree |
|
Central geographical ship's position and time standard
...