...
| Sensorweb integration | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||
|
| Sensorweb integration | ||||
|---|---|---|---|---|
| ||||
   |
...
| Sensorweb integration | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||
Ralf Krocker | Alfred-Wegener-Institute for Polar and Marine Research | Data Provider | polarstern dship | Alfred-Wegener-Institute | dship connector
|
Components
| Metadata (Metadata Plugin) | ||||
|---|---|---|---|---|
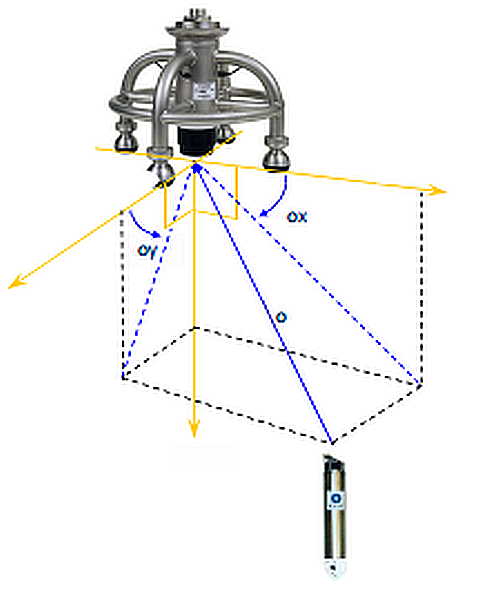
| On board Polarstern there are three different antennas available, which can be used alternatively but not at the same time.
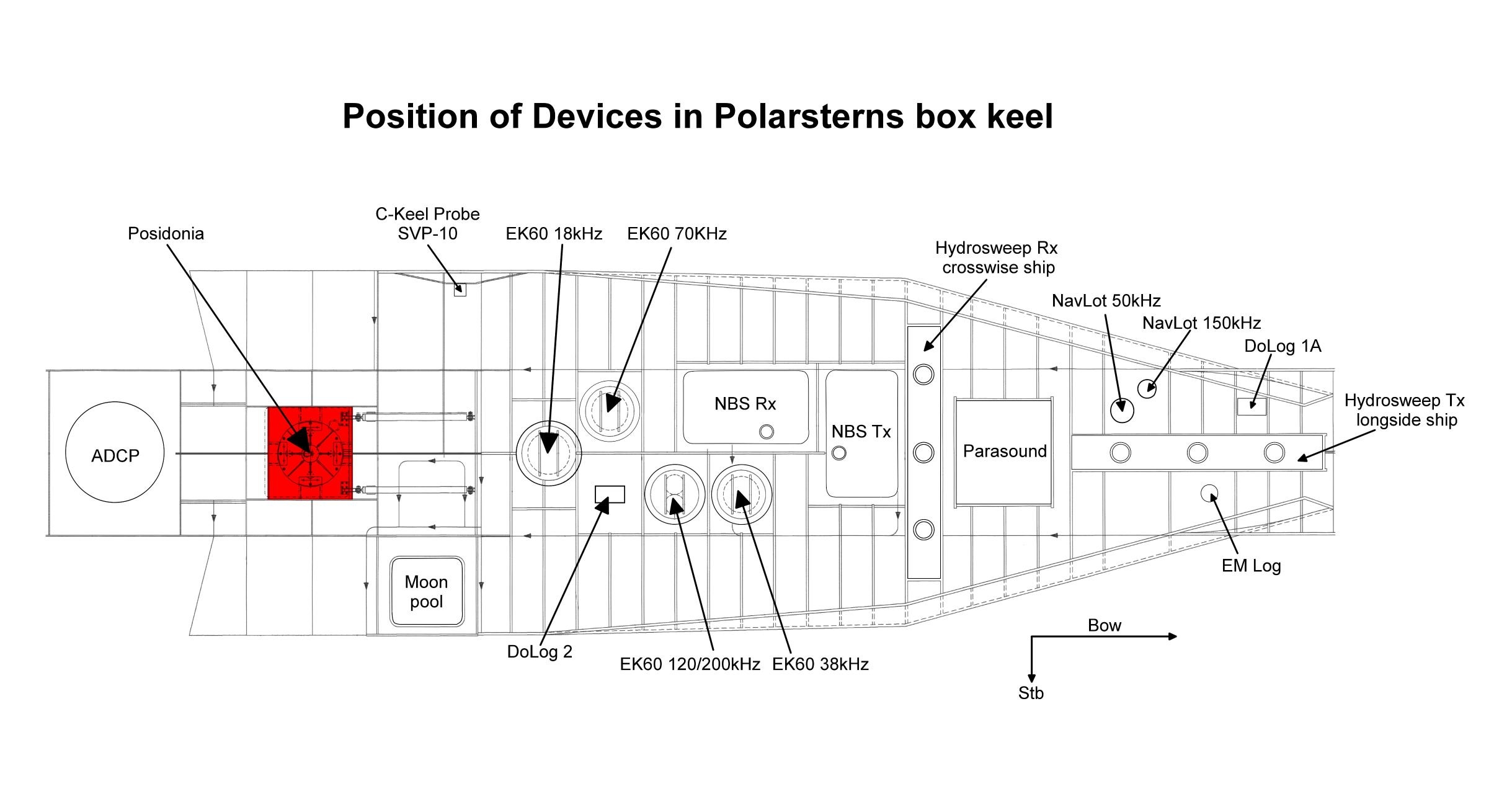
First antenna is flush and permanently mounted in ships keel at ca. 11 meter depth. The antenna is protected by window against ice sheets. The window can be opened during operation, but during open window and ice covered situation the ship must not be driven.
Second antenna is a deployable antenna by means of lowering through the moon pool.
Third antenna from Thomson Marconi is fixed mounted on a device carrier to be lowered through moon pool.
If an antenna is lowered through moon pool in ice covered areas, the ship must not be driven.
Active antenna is connected to electronic device named USBL-Box. The control and operation of the system is performed via web-Interface. Typically the system is operated from laptop on the bridge by laboratory electronic engineer.
Online data stream of Posidonia is broadcasted via UDP, which can be used by alternative visualisation tools (e.g. PosiView) or for seperately logging.
Mobile system IXSEA Oceano TT801 can alternatively be used to send release commands.
For Posidonia system are two transponders of type Oceano ET861 and two releasers of type Oceano RT 861 B1S (RT2500 S-Side Bar) on board available. The maximum operation depth of these devices is 6000 meter.||||
Doppelreleaser: 2x Oceano RT 861 |
IXSEA Oceano TT801 |
|---|


Position
| Sensorweb integration | ||||
|---|---|---|---|---|
| ||||
| No local frame definition found in sensor.awi.de.available. |
Data logging, storage and archiving
...
| Sensorweb integration | |||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| |||||||||||||||||||||||||||||||||
|
Central geographical ship's position and time standard
| Metadata (Metadata Plugin) | ||||
|---|---|---|---|---|
| Time synchronising for USBL-Box is provided by TRIMBLE GPS receiver.
Geographical ship's position and orientation is provided by MRU Ixblue Hydrins.||||
Rawdata storage on board
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
Storage of data in DShip system is established for transponders with number 0 (=antenna), 1, 2, 3 and 4.
| ||
Dship
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
Reduced measurement data. | ||
| Metadata list |
|---|
|| Device name | POSIDONIA ||
|| Parameters| day; EW; month; NS; position_latitude \[°\]; position_longitude \[°\]; raw_time \[secs\]; transponder_No; transponder No (rel); x \[m\]; y \[m\]; year; z (depth) \[m\] || |
Data archiving on land
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
After the cruise the DShip data set can be extracted from https://dship.awi.de/. | ||
| Metadata list |
|---|
Documentation
...