...
| Sensorweb integration |
|---|
| urn | vessel:heincke:gaps |
|---|
| contenttype | Metadata |
|---|
|
| Manufacturer | iXblue |
|---|
| Model | OIGAPS-Carbone, PN: 430 9000 |
|---|
| Serial No. | 097 |
|---|
| Type | ultra short baseline positioning systems |
|---|
| REGISTRY-Link | ↪ REGISTRY (2359) |
|---|
|
| Sensorweb integration |
|---|
| urn | vessel:heincke:gaps |
|---|
| contenttype | Images |
|---|
|
|
...
| Metadata (Metadata Plugin) |
|---|
| GAPS: from 22 to 30 kHz; Transponder: 19.5, 20.0, 20.5 or 21 kHz |
|
Contacts
| Sensorweb integration |
|---|
| urn | vessel:heincke:gaps |
|---|
| contenttype | Contacts |
|---|
|
| Name | Institution | Role |
|---|
| Ralf Krocker | Alfred |
--| Institute, Helmholtz Centre for Polar and Marine Research | Engineer In Charge |
|
Components
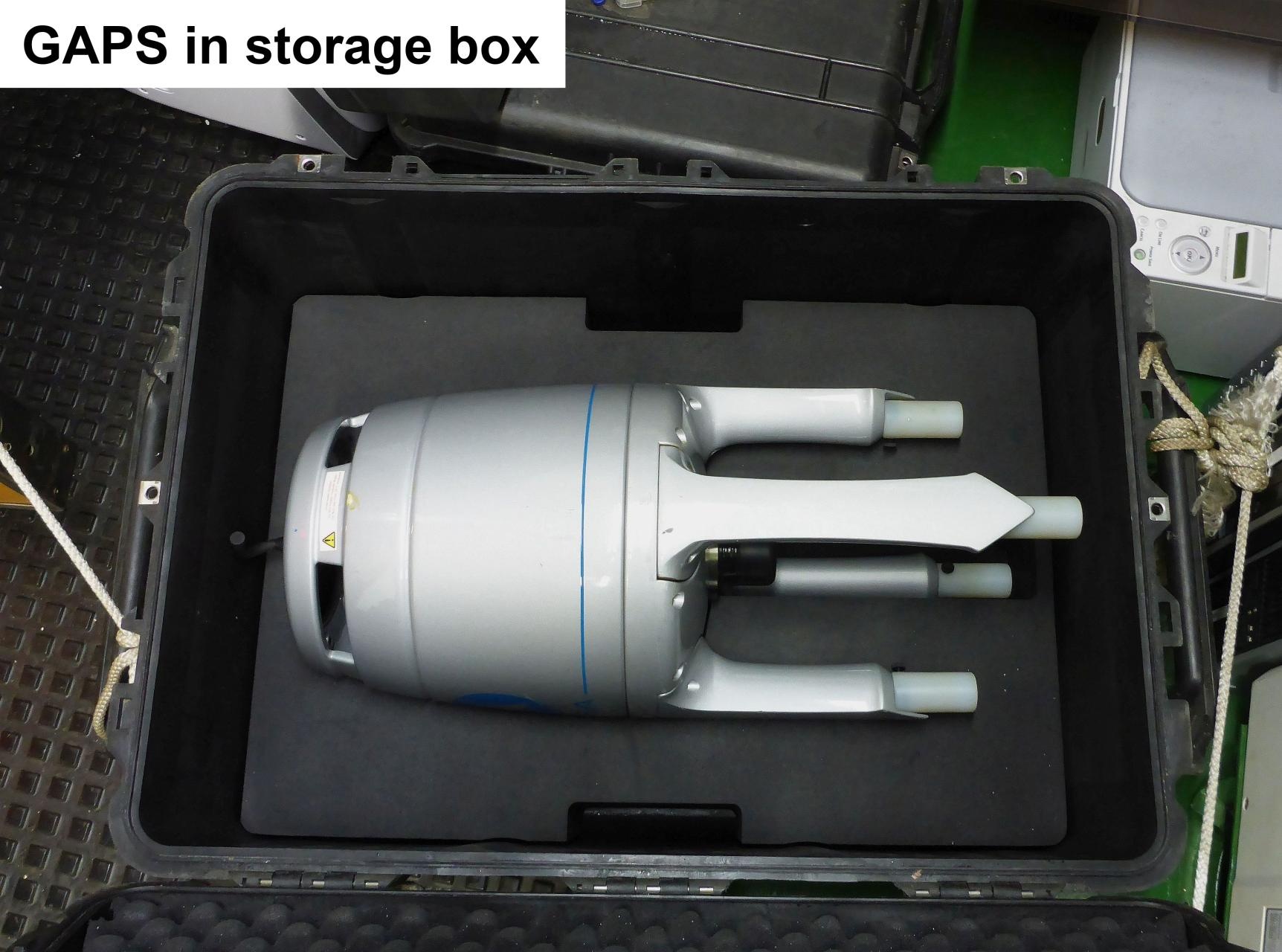
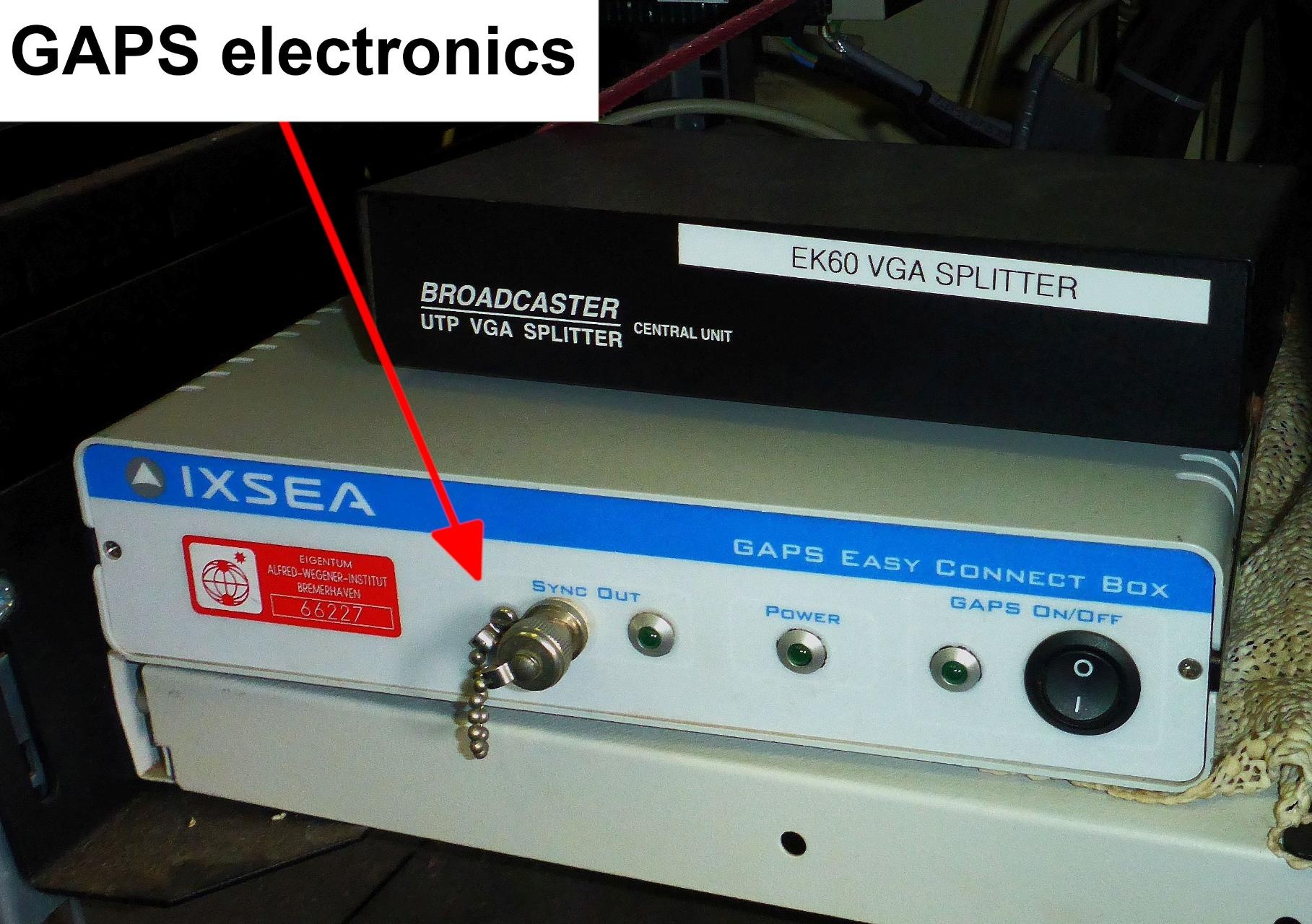
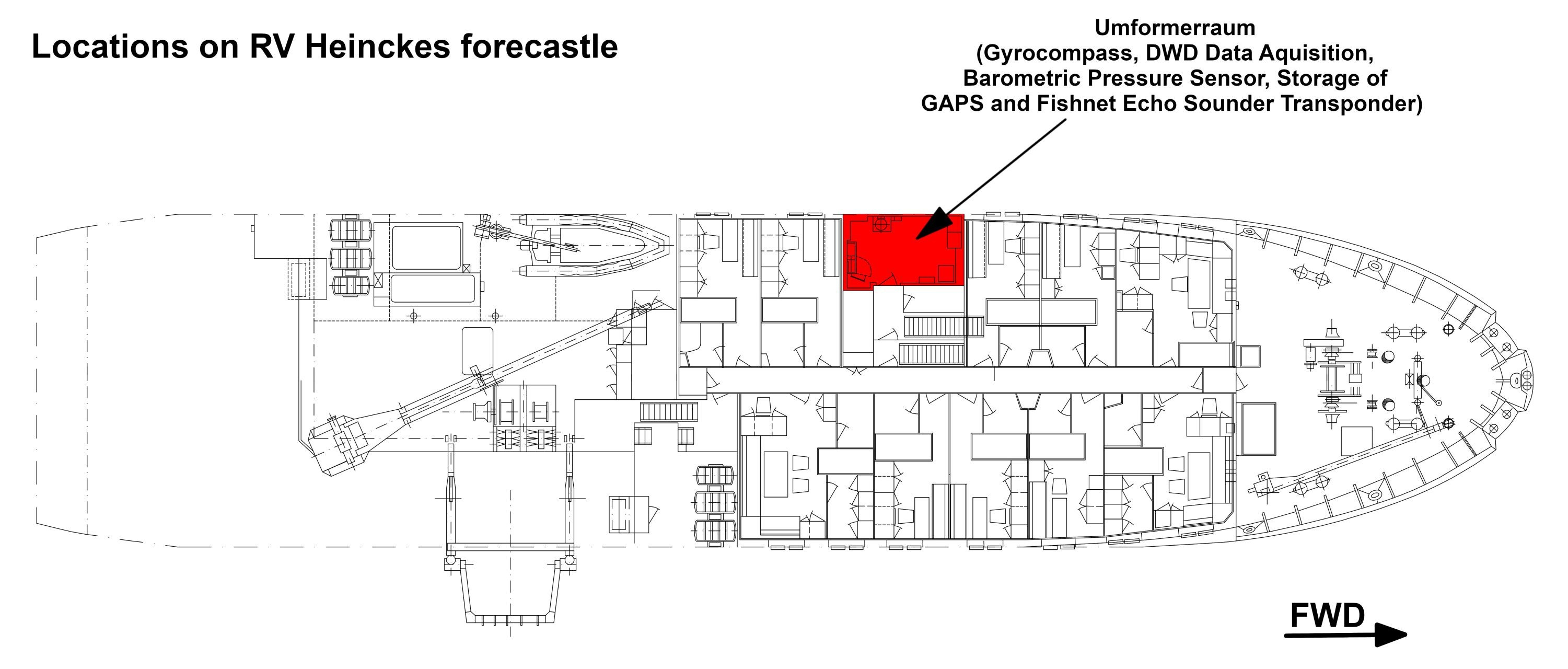
The system consists of the GAPS antenna itself, mounting for installation at the ships bottom, the Easy Connect Box (ECB) and monitoring software "GAPS MMI - Man Machine Interface". The transponders can be mounted to winch wire or to a submarine vehicle or other submarine object.
...
| Sensorweb integration |
|---|
| urn | vessel:heincke:gaps |
|---|
| contenttype | Subdevices |
|---|
|
Type | Serial Number | REGISTRY-Link |
|---|
| Oceano Transponder MT832E-HD-R 347 | MT832E-HD-R |
acoustic backscatter sensortransponder |
Position
| Sensorweb integration |
|---|
| urn | vessel:heincke:gaps |
|---|
| contenttype | LocalFrame |
|---|
|
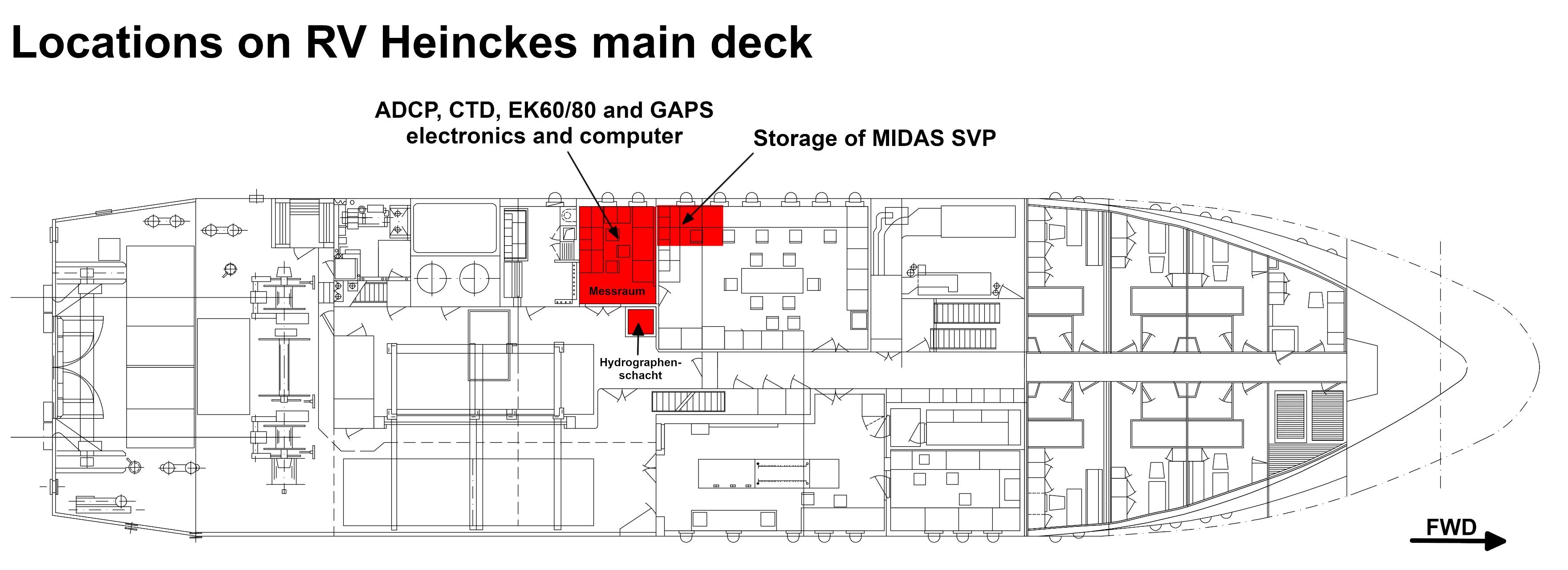
Origin Description:| Info | Electronics of the GAPS system are located in the server rack in the Mess- and Registrierraum and software is installed on the CTD-PC. The GAPS is deployed via the Hydrographenschacht. | | X | 0.0 (no unit given)
(no description given) | | Y | 0.0 (no unit given)
(no description given) | | Z | 0.0 (no unit given)
(no description given) |
|
Data logging, storage and archiving
...
| Sensorweb integration |
|---|
| urn | vessel:heincke:gaps |
|---|
| contenttype | Parameters |
|---|
|
Sensor | O2ARegistry Output Type | Unit |
|---|
| heading | attitude |
degreedegreedegree| deg | | altitude | attitude | m | | roll | attitude |
degreedegree| deg | | transponder number | index | unknown | | x-coordinate | distance | m | | y-coordinate | distance | m | | z-coordinate | distance | m | | depth | depth | m | | month | date and time | unknown | | time in hours | date and time | unknown | | year | date and time | unknown | | day | date and time | unknown |
|
Central geographical ship's position and time standard
| Metadata (Metadata Plugin) |
|---|
|
Time synchronising of the PC with MMI-Software via Windows-Domain-Affiliation. Centering of GPS-antenna position to GAPS and to transponders. |
|
Rawdata storage on board
| Metadata (Metadata Plugin) |
|---|
|
If pinging is started, raw data are stored on PC where MMI software is installed in folder C:\\IXSEA\data\.
Content of positioning records of type $PTSAG is stored in DShip system.
|
|
DShip
| Metadata (Metadata Plugin) |
|---|
| Uncorrected measurement data. |
|
| Metadata list |
|---|
|| Device name | GAPS ||
|| Parameters| Transponder2; Transponder3; Transponder1; Ship0; Altitude std dev; GAPS.HEHDT.Sentence; GAPS.PIXSE.ATI.datafield01; GAPS.PIXSE.ATI.datafield04; GAPS.PIXSE.STDH.datafield01; GAPS.PIXSE.STDP.datafield01; Heading \[deg\]; Heading std dev; Latitude std dev; Longitude std dev; Pitch \[deg\]; Pitch std dev; Roll \[deg\]; Roll std dev ||
|| Transponder Parameter| Day; Depth \[m\]; EW; Month; NS; Time; Transponder No SAG; Transponder No SAX; X coordinate \[m\]; Y coordinate \[m\]; Year; Z coordinate \[m\] ||
|| Ship0 Parameter| Day; Depth \[m\]; EW; GAPS.PTSAG.0.Latitude; GAPS.PTSAG.0.Longitude; Month; NS; Time; Transponder_No_SAG;Transponder_No_SAX; X_coordinate \[m\]; Y_coordinate \[m\]; Year; Z_coordinate \[m\] || |
|
Data archiving on land
| Metadata (Metadata Plugin) |
|---|
| After the cruise the DShip data set can be extracted from https://dship.awi.de/.
|
|
Documentation
| Sensorweb integration |
|---|
| urn | vessel:heincke:gaps |
|---|
| contenttype | Resources |
|---|
|
|
...