...
| Note |
|---|
|
The Motion Sensors (Hydrins 1 and Hydrins 2) are Sensor PHINS is operated by ship's command only. |
...
| Sensorweb integration |
|---|
| urn | vessel:heincke:phins_ph-425 |
|---|
| contenttype | Summary |
|---|
|
asdfasdfasdfPHINS (Photonic Inertial Navigation System) outputs position, heading, roll, pitch, depth, velocity, and heave. Its high accuracy inertial measurement unit is based on IXSEA's FOG technology coupled with an embedded digital signal processor that runs an advanced Kalman filter. |
| Sensorweb integration |
|---|
| urn | vessel:heincke:phins_ph-425 |
|---|
| contenttype | Metadata |
|---|
|
| Manufacturer | iXblue |
|---|
| Model | PHINS 6005211 |
|---|
| Serial No. | PH-425 |
|---|
| Type | motion sensor |
|---|
| REGISTRY-Link | ↪ REGISTRY (8573) |
|---|
|
| Sensorweb integration |
|---|
| urn | vessel:heincke:phins_ph-425 |
|---|
| contenttype | Images |
|---|
|
asdfasdfasdf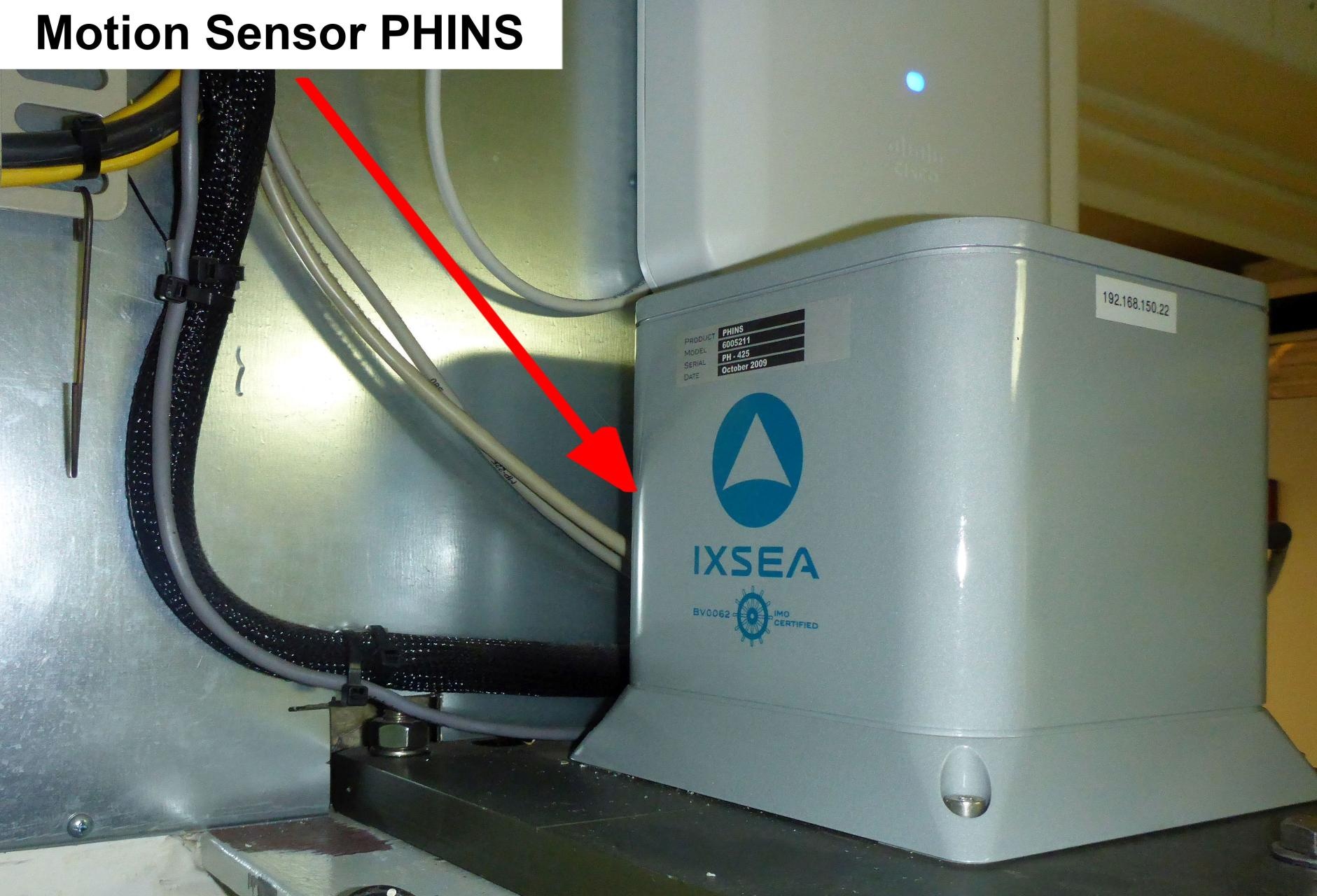 Image Added Image Added 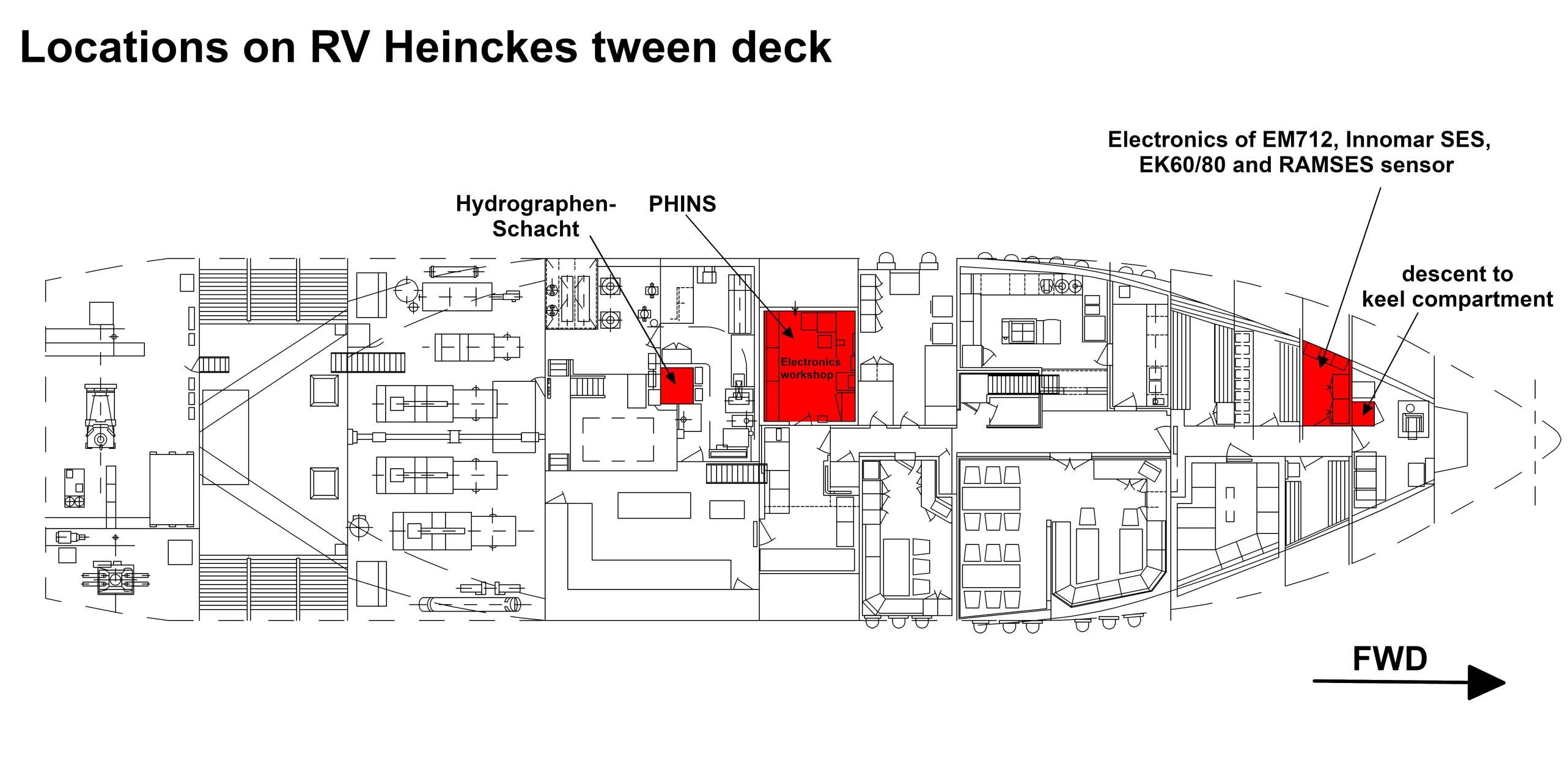 Image Added Image Added  Image Added Image Added |
Contacts
| Sensorweb integration |
|---|
| urn | vessel:heincke:phins_ph-425 |
|---|
| contenttype | Contacts |
|---|
|
asdfasdfasdf |
Components
|
| Name | Institution | Role |
|---|
| Ralf Krocker | Alfred Wegener Institute, Helmholtz Centre for Polar and Marine Research | Engineer In Charge |
|
Components
PHINS system consists of the sensor and the configuration and monitoring software IXRepeater.
| Sensorweb integration |
|---|
| urn | vessel:heincke:phins_ph-425 |
|---|
| contenttype | Subdevices |
|---|
|
asdfasdfasdfNo subdevices available. |
Position
| Sensorweb integration |
|---|
| urn | vessel:heincke:phins_ph-425 |
|---|
| contenttype | LocalFrame |
|---|
|
| Info | xyz-position of PHINS from Alignment Survey Report RV Heincke (January 2016) | | X | 25.952 m
(Positive X axis is forward and along the centerline of the vessel with X0 at the Stern point of the vessel.) | | Y | 0.847 m
(Positive Y axis is portside of centerline with Y0 at centerline at the Very stern point of the vessel.) | | Z | 5.027 m
(Positive Z axis is upwards of basis. Z0 is set to the hydrophone on midship.) |
|
Data logging, storage and archiving
...
| Sensorweb integration |
|---|
| urn | vessel:heincke:phins_ph-425 |
|---|
| contenttype | Parameters |
|---|
|
| Parameter | O2ARegistry Output Type | Unit |
|---|
| heading | attitude | deg | | heave | attitude | m | | latitude | latitude | deg | | longitude | longitude | deg | | pitch | attitude | deg | | roll | attitude | deg |
|
Central geographical ship's position and time standard
| Metadata (Metadata Plugin) |
|---|
|
|
Rawdata storage on board
| Metadata (Metadata Plugin) |
|---|
|
...
DShip
| Metadata (Metadata Plugin) |
|---|
|
|
Data archiving on land
| Metadata (Metadata Plugin) |
|---|
|
...
Documentation
| Sensorweb integration |
|---|
| urn | vessel:heincke:phins_ph-425 |
|---|
| contenttype | Resources |
|---|
|
| asdfasdfasdf |