...
| Sensorweb integration |
|---|
| urn | vessel:heincke:adcp_whm600_2250038129 |
|---|
| contenttype | Summary |
|---|
|
The WorkHorse Mariner is designed to measure real-time current profiles of coastal, inshore, and open ocean water current structures from temporary or permanent mounting in a vessel. It gives fine along-track resolution thanks to RDI’s RDI’s superior low-noise data, including bottom tracking. |
...
| Sensorweb integration |
|---|
| urn | vessel:heincke:adcp_whm600_2250038129 |
|---|
| contenttype | Metadata |
|---|
|
| Manufacturer | Teledyne RDI |
|---|
| Model | WHMVM600- |
|---|
I22500| Transducer S/N 38129 | | Type | current profiler |
|---|
SENSOR |
| Sensorweb integration |
|---|
| urn | vessel:heincke:adcp_whm600_2250038129 |
|---|
| contenttype | Images |
|---|
|
No images available.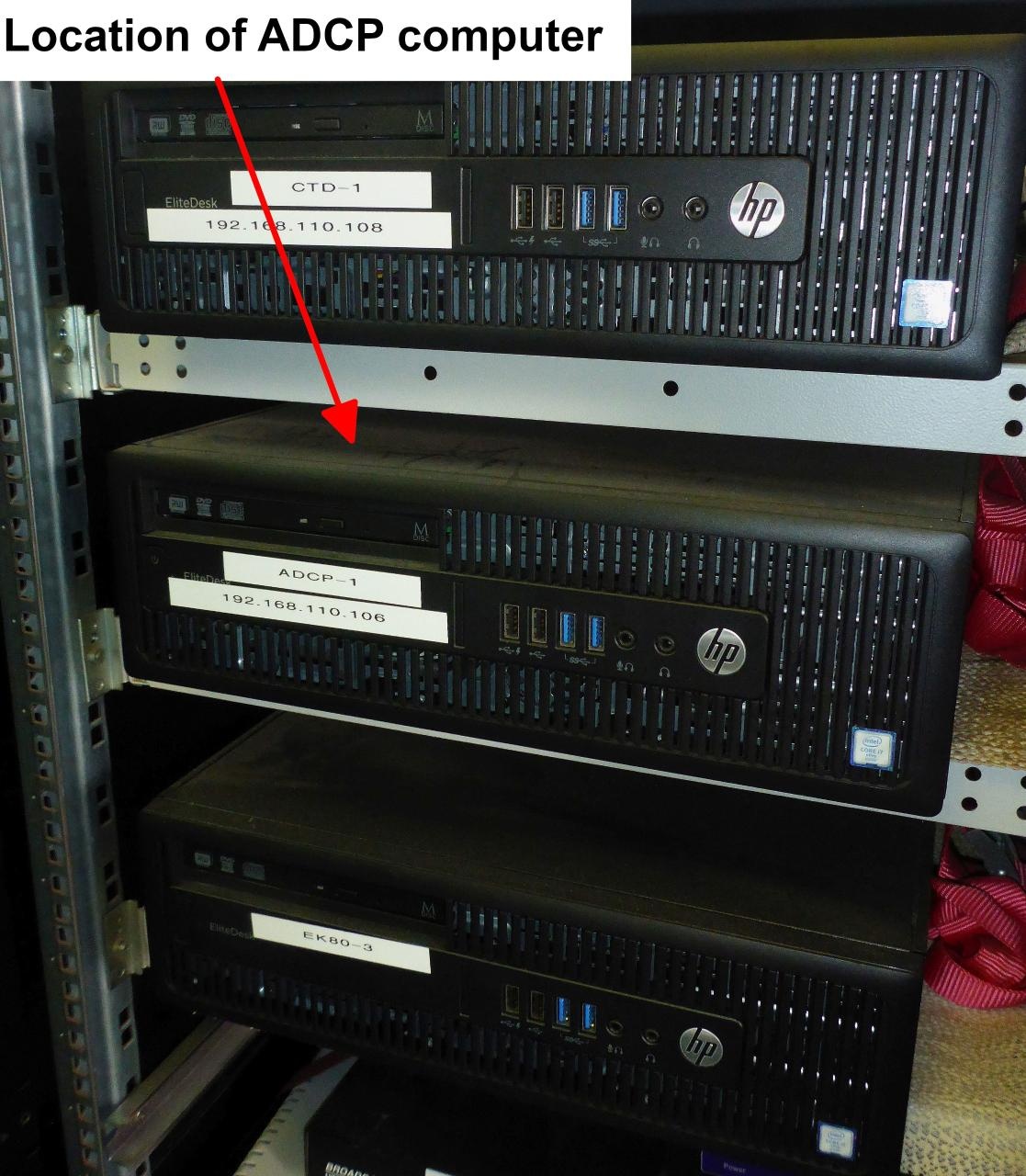 Image Added Image Added 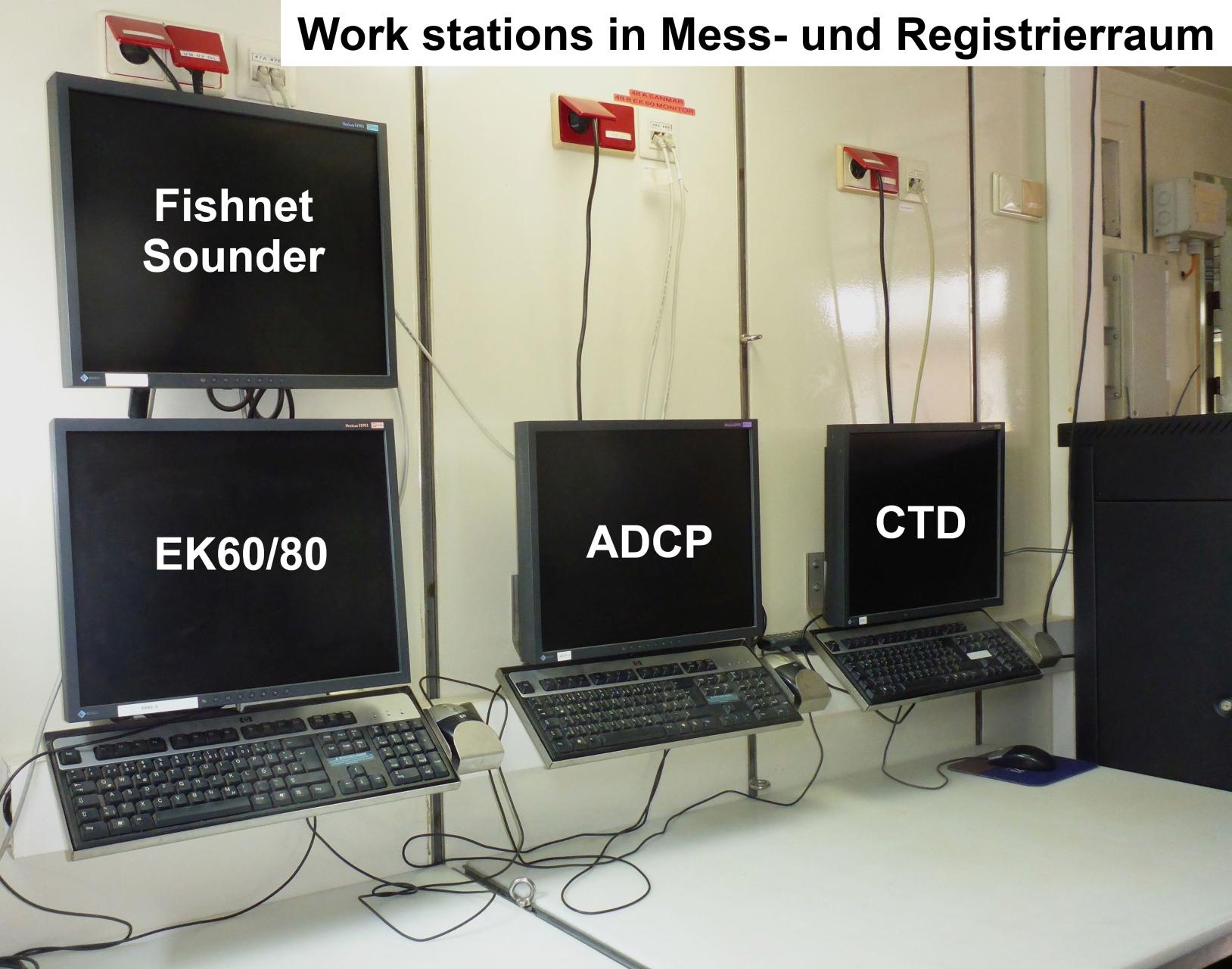 Image Added Image Added |
Transducer Frequency
600_kHz
...
| Sensorweb integration |
|---|
| urn | vessel:heincke:adcp_whm600_2250038129 |
|---|
| contenttype | Contacts |
|---|
|
| Name | Institution | Role |
|---|
| Ralf Krocker | Alfred Wegener Institute, Helmholtz Centre for Polar and Marine Research | Device Contact | | FIELAX GmbH | FIELAX Gesellschaft für wissenschaftliche Datenverarbeitung mbH | Device Contact |
|
Components
The transducer of the Workhorse Mariner 600 kHz is hull mounted in the keel of RV Heincke. The angle between the ship centerline and transducer centerline is 45° direction starboard. The electronics chassis and the operator PC are situated in the Mess- and Registrierraum on the main deck. The data acquisition and processing software VmDas and the synchronizing software Easy2Sync are installed on the computer.
...
| Sensorweb integration |
|---|
| urn | vessel:heincke:adcp_whm600_2250038129 |
|---|
| contenttype | LocalFrame |
|---|
|
| Info | xyz-position of the 600kHz transducer from Alignment Survey Report RV Heincke (January 2016) The transducer is hull mounted in the keel of RV Heincke. The operators PC and the electronic chassis are situated in the Mess- and Registrierraum. | | X | 42.829 m
(Positive X-axis is forward and along the vessels centerline. Origin is ship stern.) | | Y | 0.526 m
(Positive Y-axis is portside of centerline) | | Z | 0.077 m
(Positive Z-axis is upwards of basis) |
|
Data logging, storage and archiving
...
| Sensorweb integration |
|---|
| urn | vessel:heincke:adcp_whm600_2250038129 |
|---|
| contenttype | Parameters |
|---|
|
Sensor | O2ARegistry Output Type | Unit |
|---|
| current velocities in depth range up to 50m | current speed | m/s |
|
Central geographical ship's position and time standard
...