...
| Sensorweb integration |
|---|
| urn | vessel:polarstern:adcp |
|---|
| contenttype | Summary |
|---|
|
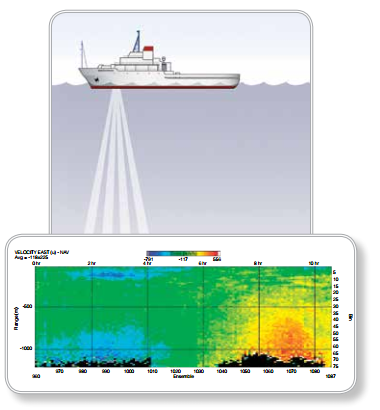
The Acoustic Doppler Current Profiler (ADCP) measures flow rates in the water body below the moving vessel up with an operating frequency of 150 kHz. Up to 400m range . Operation frequency is 150 kHz vessel:polarstern:adcp (625)can be achieved according to the data sheet. |
| Sensorweb integration |
|---|
| urn | vessel:polarstern:adcp |
|---|
| contenttype | Metadata |
|---|
|
| Manufacturer | Teledyne RDI |
|---|
| Model | Teledyne RDI Ocean Surveyor 150kHz vessel-mounted ADCP |
|---|
| Serial No. | n/atransducer 3058, chassis 1518 |
|---|
| Type | current profiler |
|---|
| REGISTRY-Link | ↪ REGISTRY (625) |
|---|
|
| Sensorweb integration |
|---|
| urn | vessel:polarstern:adcp |
|---|
| contenttype | Images |
|---|
|
|
...
| Metadata (Metadata Plugin) |
|---|
|
150 kHz |
|
Contacts
| Sensorweb integration |
|---|
| urn | vessel:polarstern:adcp |
|---|
| contenttype | Contacts |
|---|
|
| Name | Institution | Role |
|---|
| Janin SchafferSandra Tippenhauer | Alfred - Wegener -InstituteInstitute, Helmholtz Centre for Polar and Marine Research | Principal InvestigatorData Provider | | Alfred Wegener Institute for Polar and Marine Research | Alfred Wegener Institute, Helmholz Helmholtz Centre for Polar and Marine Research | Owner | | Sandra Tippenhauer | Alfred-Wegener-Institute | Principal Investigator | | Morven Muilwijk | University of Bergen | Data Provider |
|
Components
| Metadata (Metadata Plugin) |
|---|
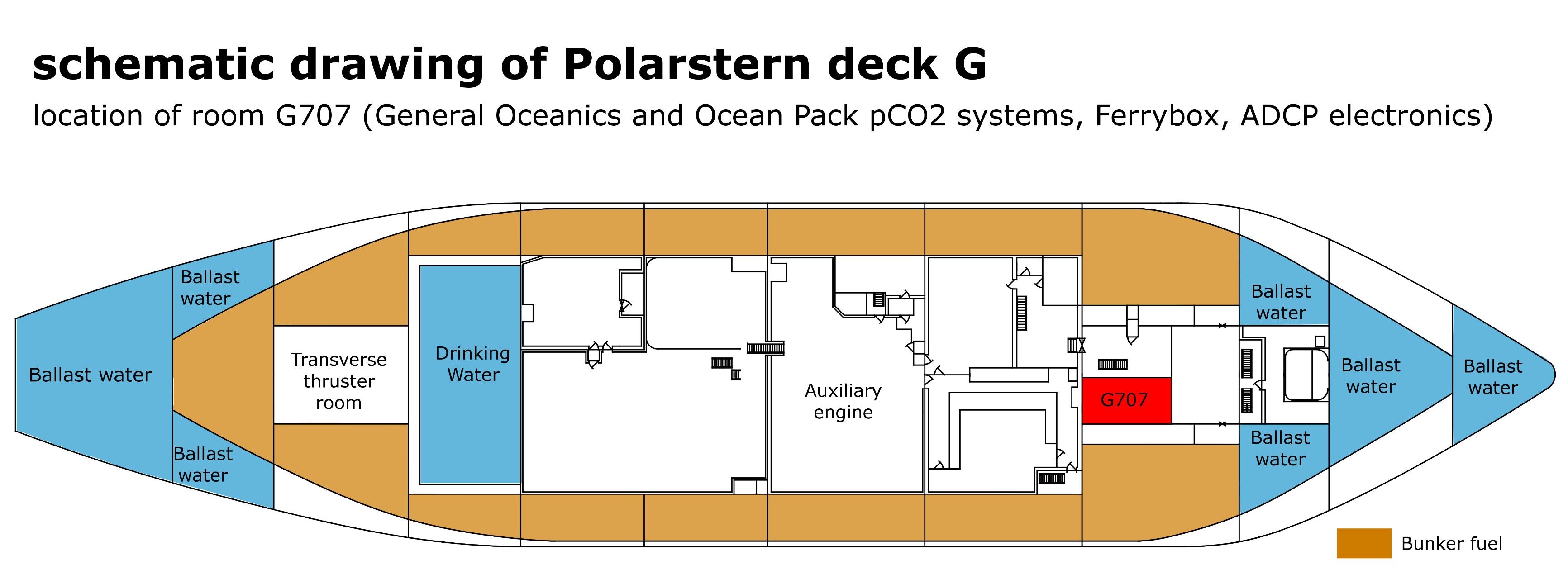
| The system consits of the transducer, the electronic chassis, the computer in the echosounder room (G-707) and the subsidiary display at the winch control station (User).
The data acquisition and processing software VmDas and the synchronizing software Easy2Sync are installed on the computer.
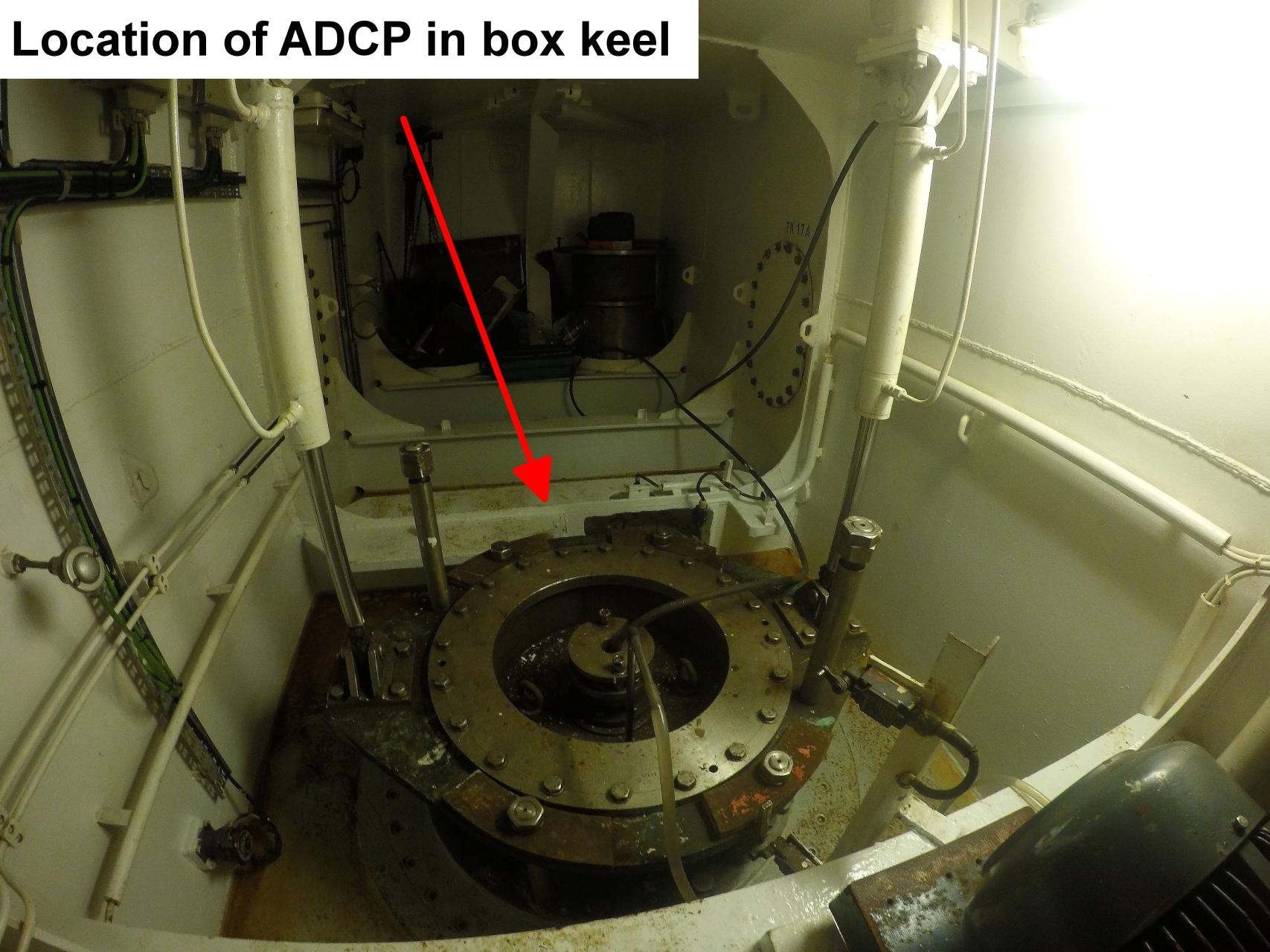
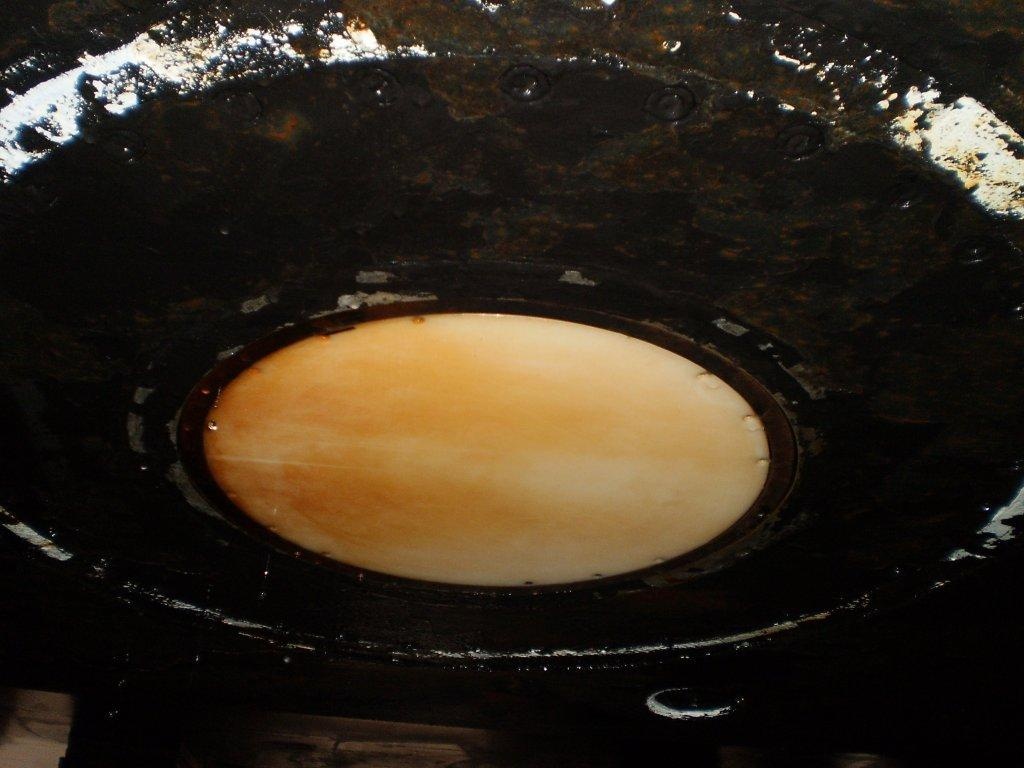
The 150kHz transducer is mounted behind an ice protection window and reaches water depth up to 350m with resolution of 4m ("Cell Size" at 1 to 5 kn ship's speed) and accuracy of about 0.30 m/s for a Single-Ping measurement.
The angle between the ship centerline and transducer centerline is 45° direction starboard. |
|
Position
| Sensorweb integration |
|---|
| urn | vessel:polarstern:adcp |
|---|
| contenttype | LocalFrame |
|---|
|
| Info | xyz-position of transducer from Alignment Survey Report RV Polarstern (June 2016), transducer located in box keel room, electronics in E525AG707, computer in winch control station | | X | 65.769 m
(X-0 is at the center of der rudder (ref. design drawing of the vessel), positive X-axis is forward and along vessel centerline) | | Y | 0.005 m
(Y-0 at centerline, positive Y-axis is portside) | | Z | 0.03 m
(Z-0 is set to the lowest point of the keel, positive Z-axis is upwards) |
|
...
| Sensorweb integration |
|---|
| urn | vessel:polarstern:adcp |
|---|
| contenttype | Parameters |
|---|
|
| Parameter | Sensor O2ARegistry Output Type | Unit |
|---|
| average east velocity | current speed | m/s | | average north velocity | current speed | m/s | | averaging interval | date and time | s | | maximum depth for averaging | depth | m | | true horizontal velocity | current speed | m/s | | true velocity direction | current direction | degreedeg | | up velocity | current speed | m/s |
|
...
| Metadata (Metadata Plugin) |
|---|
|
When starting the data acquisition the user set the PC time to UTC. Normally the difference between PC and UTC during the cruise is negligible.
GPS of Polarstern is used for the geographical position of the ADCP. |
|
Rawdata storage on board
| Metadata (Metadata Plugin) |
|---|
| Mass data: The data acquisition and processing software VmDas creates rawdata on the local drive of the computer.
Every hour the software Easy2Sync copies the data to a local backup file structure.
Every 3 hours the software Easy2Sync synchronizes the backup data to the directory structure of the mass storage.
Attention: Deleting files in the directory structure of the mass storage will also delete these files in the backup file structure with the next synchronization run. But: As long as these files are not removed from the local rawdata drive these files will be copied again to the local backup file structure with the next backup run and to the directory structure of the mass storage with the next synchronization run.
|
|
| Metadata list |
|---|
|| root directory | C:\ADCPData\ \\ or \\ C:\ADCPDataBackup\ \\ or \\ \\polsrv1\data01\ADCP\... ||
|| directory name | CruiseNo \\ e.g. \\ ANT25_3 ||
|| file name | CruiseNoVVV_RRRRRR.ENR \\ CruiseNoVVV_RRRRRR.ENS \\ CruiseNoVVV_RRRRRR.ENX \\ CruiseNoVVV_RRRRRR.LTA \\ CruiseNoVVV_RRRRRR.N1R \\ CruiseNoVVV_RRRRRR.NMS \\ CruiseNoVVV_RRRRRR.STA \\ CruiseNoVVV_RRRRRR.LOG \\ CruiseNoVVV_RRRRRR.VMO \\ with: \\ VVV = version No. \\ RRRRRR = running No. \\ e.g. \\ ANT25_3012_000000.* ||
|| Data volume (MB per day) ca | 350 ||
|| Number of files per day ca | 35 || |
|---|
|
Dship
| Metadata (Metadata Plugin) |
|---|
|
Reduced and unevaluated set of measurement data. |
|
| Metadata list |
|---|
|| Device name | ADCP ||
|| Parameters | average east velocity \[m/s\]; average north velocity \[m/s\]; averaging interval \[s\]; maximum depth for averaging \[m\]; minimum depth for averaging \[m\]; number of measurements used for averaging; true horizontal velocity \[m/s\]; true velocity direction \[°\]; up velocity \[m/s\] || |
|---|
|
Data archiving on land
| Metadata (Metadata Plugin) |
|---|
| After the cruise, the operator transfers the measurement data along with required meta data to AWI after consultaion with the data scientist and AWI Logistics. Then, the data including meta data can be extracted from https://www.pangaea.de/ (for authorized users only). The reduced, unevaluated DShip data set can be extracted from https://dms.awi.de. |
|
| Metadata list |
|---|
|| File format(s) | See: Handbuch VmDas Quick Start Guide ||
|| Calibration certificates | NO || |
|---|
|
Documentation
See also http://www.rdinstruments.com/
...