...
| Sensorweb integration | ||||
|---|---|---|---|---|
| ||||
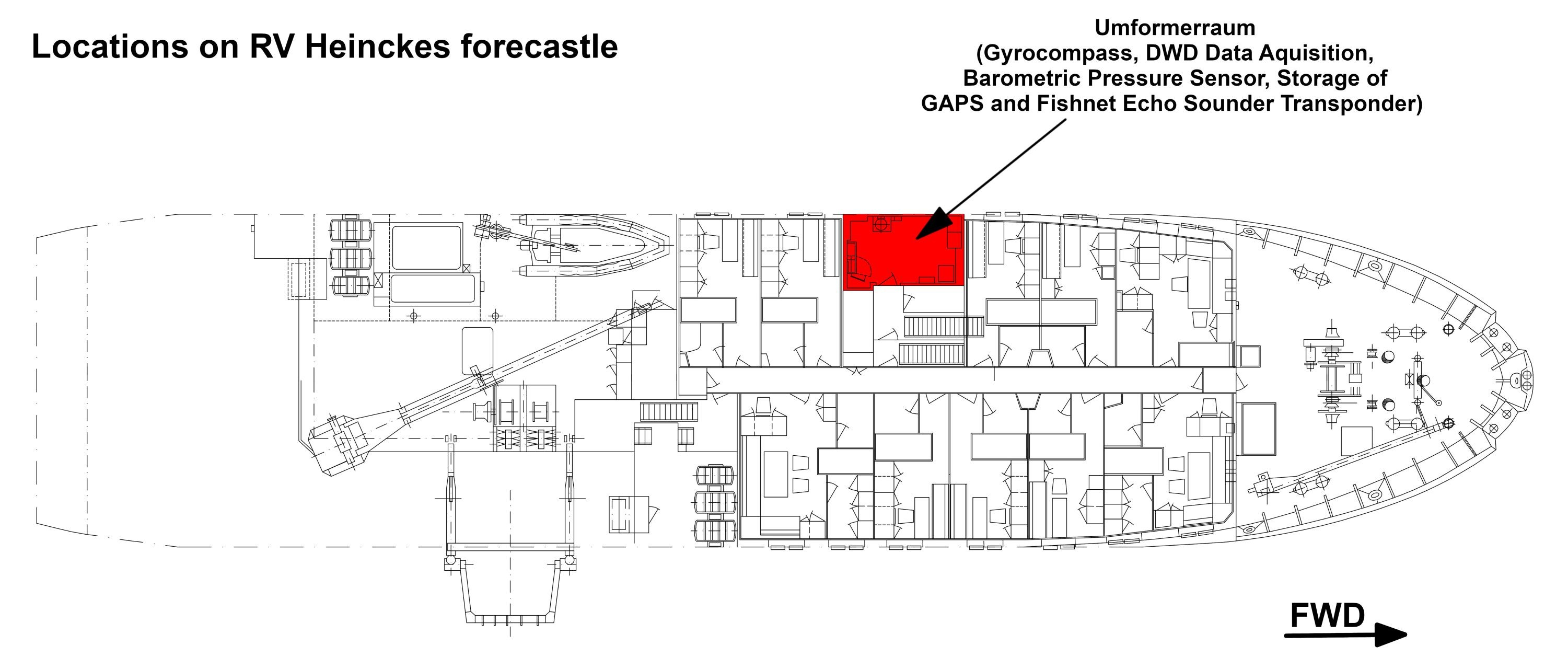
The NAVIGAT X MK 1 is a digital gyrocompass system for the maritime navigation of vessels. It provides North-speed error corrected true heading data as well as rate of turn (ROT) data for the navigation of maritime vessels. vessel:heincke:gyro (1616) |
| Sensorweb integration | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||
|
| Sensorweb integration | ||||
|---|---|---|---|---|
| ||||
  |
...
| Sensorweb integration | ||||||
|---|---|---|---|---|---|---|
| ||||||
|
Components
...
| Sensorweb integration | ||||||||
|---|---|---|---|---|---|---|---|---|
| ||||||||
|
Data logging, storage and archiving
...
| Sensorweb integration | ||||||
|---|---|---|---|---|---|---|
| ||||||
|
Central geographical ship's position and time standard
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
System is neither time synchronized nor geographically positioned. This is done by DShip receiving these data for logging. | ||
Rawdata storage on board
| Metadata (Metadata Plugin) | ||||
|---|---|---|---|---|
| Data storage in DShip system.
||||
DShip
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
Uncorrected measurement data. | ||
| Metadata list |
|---|
|| Device name | Gyro ||
|| Parameters| Heading \[deg\] || |
Data archiving on land
| Metadata (Metadata Plugin) | ||||
|---|---|---|---|---|
| After the cruise the DShip data set can be extracted from https://dms.awi.de.||||
Documentation
| Sensorweb integration | ||||
|---|---|---|---|---|
| ||||
...