...
| Note |
|---|
|
Please note that the Marine Gravitymeter System Lacoste and Romberg Gravity Meter can only be operated upon request. Request operations with the Marine Gravitymeter System to AWI-Logistics in sufficient time prior to the cruise. |
Summary
| Sensorweb integration |
|---|
| urn | vessel:polarstern:LR_Grav1031 |
|---|
| contenttype | Summary |
|---|
|
A gravimeter is used to measure the gravitational field of the earth. The gravimeter on board of Polarstern is situated on a gyro-stabilized platform to compensate for the ships movement. It is a spring and mass system with magnetic compensation, the length of the spring being proportional to the gravitationThe LaCoste and Romberg gravity meter is used for tying of the data of marine gravity meter KSS 32 M into the international standard gravity network. It is small and portable and can therefore be used to measure relative gravity at absolute gravity points on land during port calls. |
| Sensorweb integration |
|---|
| urn | vessel:polarstern:LR_Grav1031 |
|---|
| contenttype | Metadata |
|---|
|
Bodensee Gravitymeter Geosystem GmbH (BGGS)KSS 32 Mn/a |
Contacts
| Sensorweb integration |
|---|
| urn | vessel:polarstern:LR_Grav1031 |
|---|
| contenttype | Contacts |
|---|
|
| Metadata (Metadata Plugin) |
|---|
|
The Marine Gravitymeter System consits of the Gravitymeter KSS 32-M and the operator-laptop in the Gravitymeter Room on board. The Gravitymeter control system and data acquisition software BGGS DACQS is installed on the laptop.
Graeme Eagles| Alfred-Wegener Institute of Polar and Marine Research | Principal Investigator | | Graeme Eagles | Alfred-Wegener Institute of Polar and Marine Research | Data Scientist | --| Institute, Helmholtz Centre for Polar and Marine Research | Engineer In Charge |
Alfred Wegener Institute for Polar and Marine Research| Graeme Eagles | Alfred Wegener Institute, |
Helmholz | Helmholtz Centre for Polar and Marine Research |
Owner | | polarstern dship | Alfred-Wegener-Institute | dship connector | |
Components
| Principal Investigator, Data Scientist |
|
Position
| Sensorweb integration |
|---|
| urn | vessel:polarstern:LR_Grav1031 |
|---|
| contenttype | LocalFrame |
|---|
|
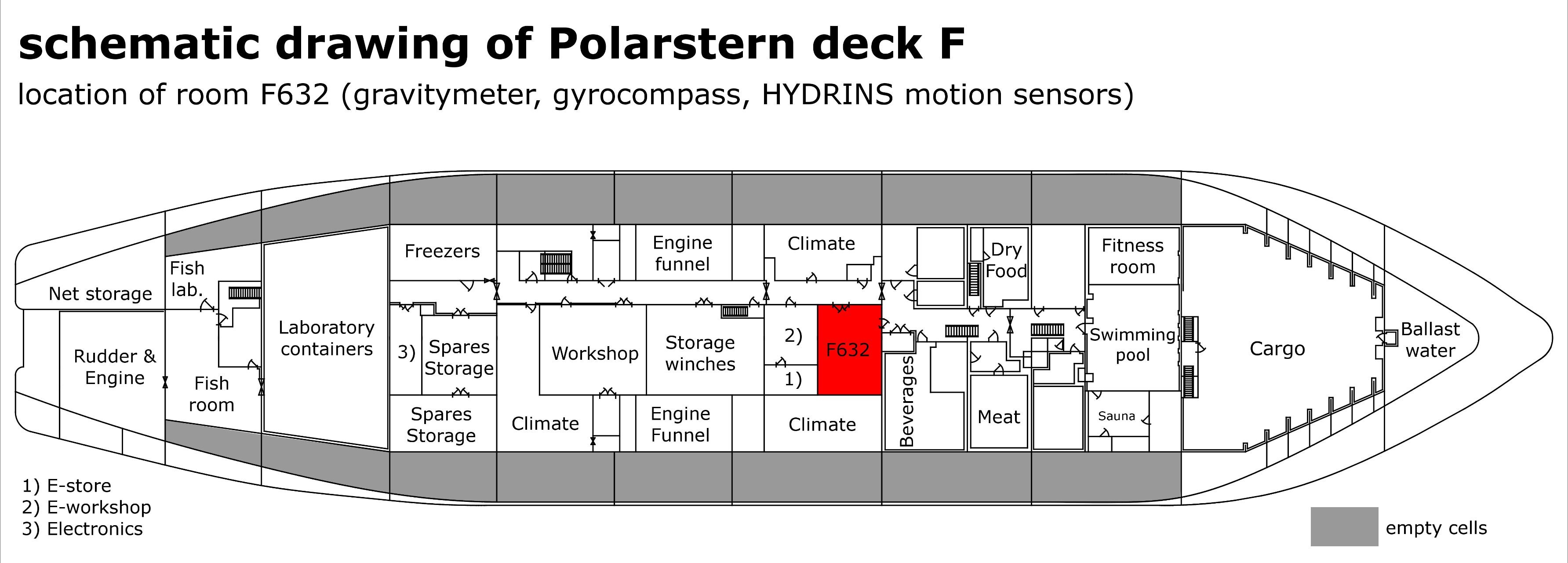
| Info | device is located in on F-Deck, room |
Origin Description: | xyz-position from Alignment Survey Report RV Polarstern (June 2016), located in :5699 m(X-0 is at the center of der rudder (ref. design drawing of the vessel), positive X-axis is forward and along vessel centerline0 none
(no description given) | | Y |
:147 m(Y-0 at centerline, positive Y-axis is portside0 none
(no description given) | | Z |
:1181 m(Z-0 is set to the lowest point of the keel, positive Z-axis is upwards0 none
(no description given) |
|
Data logging, storage and archiving
...
| Sensorweb integration |
|---|
| urn | vessel:polarstern:LR_Grav1031 |
|---|
| contenttype | Parameters |
|---|
|
Sensor gravity| O2ARegistry Output Type | Unit |
|---|
| acceleration | acceleration | m/s^2 | |
Central geographical ship's position and time standard
| Acceleration | acceleration | m/s2 |
|
| Metadata (Metadata Plugin) |
|---|
| 0 | timestandard |
|---|
Rawdata storage on board
| Metadata (Metadata Plugin) |
|---|
|
Dship
| Metadata (Metadata Plugin) |
|---|
|
| Metadata list |
|---|
|
Data archiving on land
| Metadata (Metadata Plugin) |
|---|
|
| Metadata list |
|---|
|
Documentation
The manuals are located in the Gravitymeter Room on board.
| Sensorweb integration |
|---|
| urn | vessel:polarstern:LR_Grav1031 |
|---|
| contenttype | Resources |
|---|
|
|