...
| Note |
|---|
|
Please note that operations of the Sediment Echo Sounder Atlas Parasound P70 requires experienced scientific staff on board for permanent supervision of data aquisition and storage. The system is not operated by the ship's crew. Announce operations with the Sediment Echo Sounder Atlas Parasound P70 to AWI-Logistics prior to the cruise and clarify the data transfer after the cruise. |
Summary
...
html-Links Spaces:
Summary
Description
Contacts
Parameters
Resources
Events
Subdevices
Images
Position
----------------------------------------------------------------------
Additional information
| integration |
|---|
| urn | vessel:polarstern:parasound_p70 |
|---|
| contenttype | Summary |
|---|
|
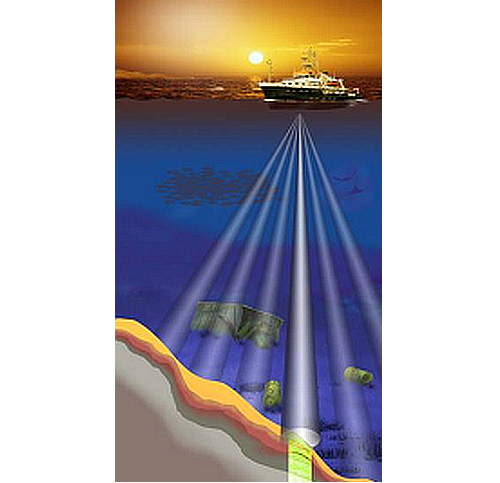
The Sediment Echo Sounder surveys the upper layers of the seafloor via the reflection of acoustic signals. Depending upon the reflectivity of the sediments penetration depths of about 200m can be reached. |
| Sensorweb integration |
|---|
| urn | vessel:polarstern:parasound_p70 |
|---|
| contenttype | Metadata |
|---|
|
| Manufacturer | Teledyne RESON (ATLAS Hydrographic before takeover) |
|---|
| Model | Parasound P70 |
|---|
| Serial No. | n/a |
|---|
| Type | echo sounder |
|---|
| REGISTRY-Link | ↪ REGISTRY (1392) |
|---|
|
Transducer Frequency
...
| Metadata (Metadata Plugin) |
|---|
|
High frequency: 19 - 38 kHz; Parametric signal: 0.5 - 6.0 kHz |
External Manuals
Das Sedimentecholot PARASOUND DS ist ein im Schiff fest installiertes parametrisches System zur Erkundung der Beschaffenheit und des Aufbaus der oberen Schichten des Meeresbodens (bis zu 200 m) durch akustische Signale, die vom Meeresboden reflektiert werden. Sedimente am Meeresboden lassen sich durch ihre Schallreflektivität unterscheiden. Es treten Übergänge von schallweichen, überwiegend feinkörnigen, stark wasserhaltigen und weichen Sedimenten bis zu schallharten, oft sandigen Sedimenten oder härteren Gesteinen auf. Die Informationen über die Bodenbeschaffenheit liefern wichtige Hinweise für einen Geräteeinsatz zur Beprobung des Meeresbodens.
 Image Removed
Image Removed
Der Frequenzbereich und die Länge der akustischen Signale sind variabel von 2,5 bis 5,5 kHz und von einer bis acht Wellenlängen. Diese Frequenzen werden durch den parametrischen Effekt erzeugt: D. h. aufgrund der nicht-linearen Wechselwirkung zweier Signale hoher Amplitude und dicht beieinander liegender und gleichzeitig abgestrahlter Primärfrequenzen (18 kHz und 20,5 bis 23,5 kHz in Schritten von 0,5 kHz) wird eines neues (parametrisches) Signal erzeugt, dessen Frequenz gleich der Differenzfrequenz der beiden Primärfrequenzen ist und das in dem enggebündelten Schallkegel (ca. 4° Öffnungswinkel) der Primärfrequenzen abgestrahlt wird. Dieser eng gebündelte Schallstrahl ist gegen die Schiffsbewegun-gen stabilisiert und ermöglicht eine hochauflösende Abbildung der obersten Sedimentschichten. Die Daten können für weitere Auswertungen 'online' ausgedruckt und digital registriert werden.
Komponenten
Das System besteht aus dem Schwinger, der Elektronik Einheit sowie den beiden PCs und der Tochteranzeige auf der Brücke. Auf dem PC ist eine herstellerspezifische Datenerfassungs- und Verarbeitungs-Software installiert. Die Synchronisierung des lokalen Datenverzeichnis mit dem Massenspeicher erfolgt manuell.
Schwinger
Der aus vier Segmenten bestehende Schwinger ist ohne Eisschutzfenster im Kastenkiel montiert. Er sendet mit einem Frequenzbereich von 18 - 39 kHz und erreicht damit eine Wassertiefe von 10 bis 11000m. Durch Frequenzüberlagerungen werden "Parametric low frequencies" zwischen 0.5 - 6.0 kHz erzeugt. Die Eindringtiefe in das Sediment beträgt > 200m (in Abhängigkeit von der Bodenbeschaffenheit). Die zugehörige Auflösung beträgt 6.1 cm.
 Image Removed
Image Removed
Eine Liste der an Bord befindlichen Schwinger mit ihren Frequenzen finden Sie hier.
Zentrale geographische Schiffsposition und Zeitnormal
Die aufgezeichnete geographische Position ist die Schiffsposition (Standort MINS). Berücksichtigt wird der Hebelarm zwischen Schwinger und dem zentralen Motionsensor MINS. Die Zeitsynchronisierung erfolgt per NMEA-Telegramm aus dem ZDA-Datensatz oder alternativ über ntp zwischen dem DIP2 und dem zentralen ntp-Server im Bordnetz. Innerhalb des Parasound-Systems fungiert der DIP2 als ntp-Server für die PCs und restlichen DIPs.
Datenspeicherung und Archivierung
...
*Rohdaten an Bord:* Die herstellerspezifische Datenerfassungs\- und Verarbeitungs-Software ParaStore des PCs erzeugt Rohdaten je nach Systemkonfiguration auf der lokal Datenplatte. * PHF = primary high frequency beam amplitudes * SLF = secondary low frequency beam amplitudes * SHF = secondary high frequency beam amplitudes Diese Daten werden manuell auf dem Massenspeicher in der folgenden Dateistruktur abgespeichert: || Stammverzeichnis || Verzeichnisname || Dateiname || | R:\data01\parasound\ | Reisenummer\PHF_ASD_YYYYMMDD\ \\ \\ Reisenummer\PHF_PS3_YYYYMMDD\ \\ Reisenummer\PHF_SGY_YYYYMMDD\ \\ Reisenummer\SLF_ASD_YYYYMMDD\ \\ \\ Reisenummer\SLF_PS3_YYYYMMDD\ \\ Reisenummer\SLF_SGY_YYYYMMDD\ \\ Reisenummer\SHF_ASD_YYYYMMDD\ \\ \\ Reisenummer\SHF_ASD_3YYYYMMDD\ \\ Reisenummer\SHF_SGY_YYYYMMDD\ \\ Reisenummer\screenshots\ \\ Reisenummer\PSAUX\ \\ Reisenummer\DSHIP\ | PS3PHF\_YYYY-MM-DDThhmmssZ\_<identNo>.asd.acf \\ PS3PHF\_YYYY-MM-DDThhmmssZ\_<identNo>.asd.acf.idx \\ PHFYYMMDDhhmm.ps3 \\ PHFYYMMDDhhmm.sgy \\ PS3SLF\_YYYY-MM-DDThhmmssZ\_<identNo>.asd.acf \\ PS3SLF\_YYYY-MM-DDThhmmssZ\_<identNo>.asd.acf.idx \\ SLFYYMMDDhhmm.ps3 \\ SLFYYMMDDhhmm.sgy \\ PS3SHF\_YYYY-MM-DDThhmmssZ\_<identNo>.asd.acf \\ PS3SHF\_YYYY-MM-DDThhmmssZ\_<identNo>.asd.acf.idx \\ SHFYYMMDDhhmm.ps3 \\ SHFYYMMDDhhmm.sgy\\ YYYYMMDD-YYYYMMDD\YYYYMMDD_hhmm*.bmp \\ ??? \\ NAV_YYYYMMDD-YYYYMMDD.txt | mit YYYY = Jahr; MM = Monat; DD = Tag; hh = tunde; mm = Minute; ss = Sekunde; <identNo> = 8 stellige Laufende Nummer Dabei belegt die Dateistruktur das folgende Volumen: {metadata-list}|| Volumen (MB pro Tag) ca. | ??? || || Anzahl Dateien pro Tag ca. | ??? ||{metadata-list} *Rohdaten an Land:* Je nach Absprache mit der AWI-Logistik und mit dem oben genannten Geräteverantwortlichen besteht die Möglichkeit die gewonnenen Rohdaten, nachdem sie mit Metadaten versehen worden sind, über [PANGAEA|http://www.pangaea.de/search?l&q=polarstern+parasound] zur Verfügung zu stellen.Contacts
| Sensorweb integration |
|---|
| urn | vessel:polarstern:parasound_p70 |
|---|
| contenttype | Contacts |
|---|
|
| Name | Institution | Role |
|---|
| Catalina Gebhardt | Alfred Wegener Institute, Helmholtz Centre for Polar and Marine Research | Principal Investigator | | Alfred Wegener Institute for Polar and Marine Research | Alfred Wegener Institute, Helmholtz Centre for Polar and Marine Research | Owner |
|
Components
| Metadata (Metadata Plugin) |
|---|
|
|
Position
| Sensorweb integration |
|---|
| urn | vessel:polarstern:parasound_p70 |
|---|
| contenttype | LocalFrame |
|---|
|
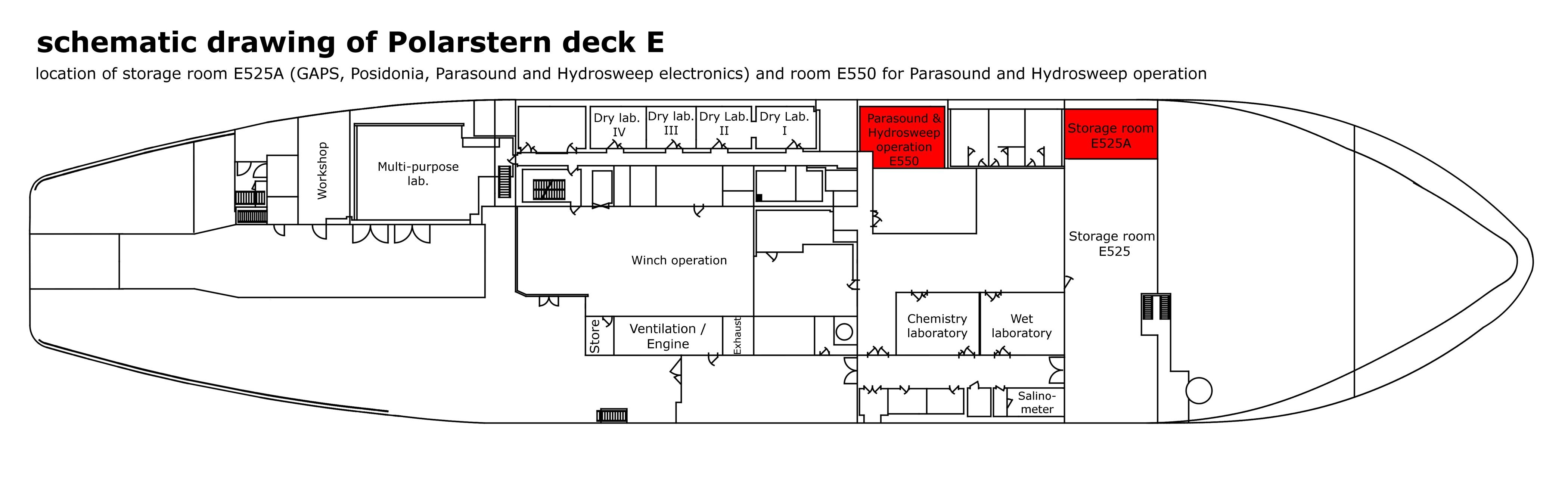
| Info | xyz-position calculated from Alignment Survey Report (2016), transducer array located in box keel, electronics located in E525A, computers located in E550 (HSPS room) | | X | 76.498 m
(X-0 is at the center of der rudder (ref. design drawing of the vessel), positive X-axis is forward and along vessel centerline) | | Y | 0.004 m
(Y-0 at centerline, positive Y-axis is portside ) | | Z | 0.0 m
(Z-0 is set to the lowest point of the keel, positive Z-axis is upwards) |
|
Data logging, storage and archiving
Logged parameters
| Sensorweb integration |
|---|
| urn | vessel:polarstern:parasound_p70 |
|---|
| contenttype | Parameters |
|---|
|
| Parameter | O2ARegistry Output Type | Unit |
|---|
| depth | depth | m |
|
Central geographical ship's position and time standard
| Metadata (Metadata Plugin) |
|---|
|
|
Rawdata storage on board
| Metadata (Metadata Plugin) |
|---|
|
|
Dship
| Metadata (Metadata Plugin) |
|---|
|
|
Data archiving on land
| Metadata (Metadata Plugin) |
|---|
|
|
Documentation
| Sensorweb integration |
|---|
| urn | vessel:polarstern:parasound_p70 |
|---|
| contenttype | Resources |
|---|
|
|
...
DShip-Daten:
Ein serieller Ausgang der Elektronik-Einheiten ist an einem
...
Lantronix 16-Port
Terminalserver im
...
Rechnerraum
angeschlossen.
| Metadata list |
|---|
|| Gerätename | PS || || Messwerte | water depth \[m\] |
...