...
| Sensorweb integration | ||||
|---|---|---|---|---|
| ||||
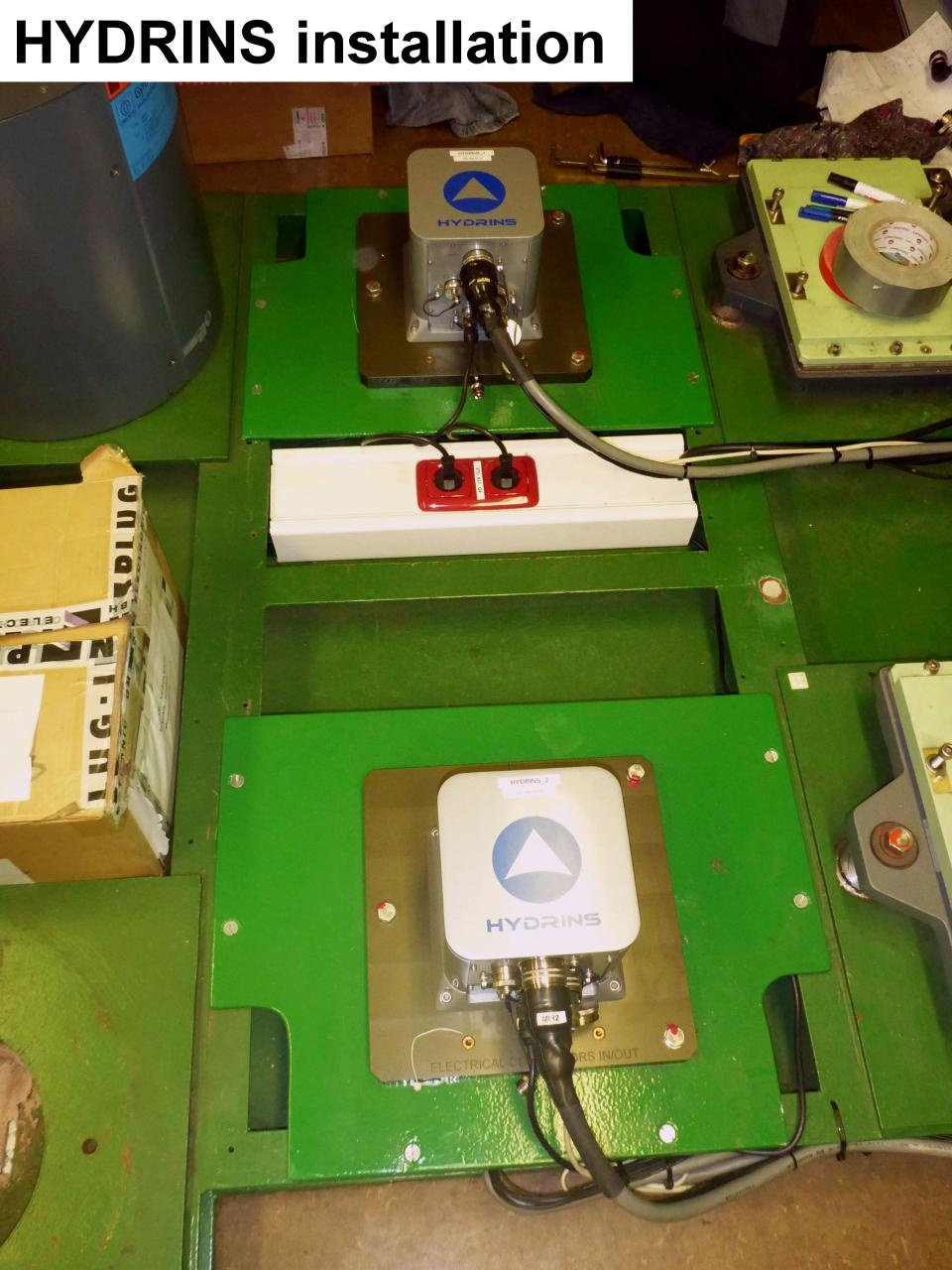
HYDRINS is a high-performance inertial navigation system (INS) optimized for hydrographic survey using multibeam echosounders. HYDRINS comprises a single compact unit and delivers highly accurate real-time position, heading, attitude and speed data. vessel:polarstern:hydrins_1 (1224) |
Hydrins 1
| Sensorweb integration | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||
|
Hydrins 2
| Sensorweb integration | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||
|
| Sensorweb integration | ||||
|---|---|---|---|---|
| ||||
   |
...
| Sensorweb integration | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| |||||||||||||
|
Components
| Metadata (Metadata Plugin) | ||||
|---|---|---|---|---|
| The sensor is an essential device providing motion and position data for a large number of scientific instruments. The system is receiving posiion data from GPS receiver and is delivering positions centered to Hydrins 1.
Several output interfaces are defined to deliver different formatted data strings with different frequency to customers.
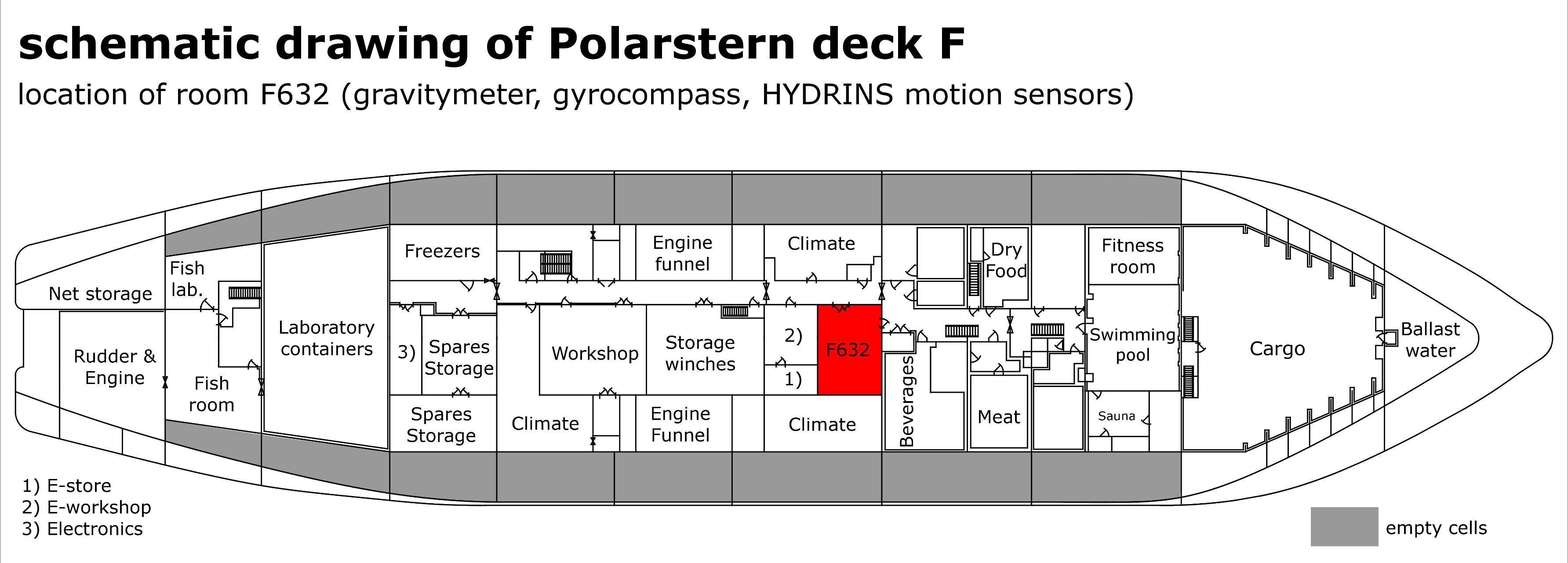
The main device is a three component laser accerelometer. It is installed in Gravity Meter Room F-632. For backup there is a second system installed.
Downstream equipment of Hydrins 1 and Hydrins 2 is ment to select on of both Hydrins to be active one and to deliver data to customers. Additionally converter boxes (Provided by firm FIELAX) are installed to split outgoing data stream and to convert it into several formats requested by customers. Nautical system NACOS is receiving position data from Hydrins as backup.||||
Position
Hydrins 1
| Sensorweb integration | ||||||||
|---|---|---|---|---|---|---|---|---|
| ||||||||
|
...
| Sensorweb integration | ||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||||||||||||||||||||||||||||||||||
|
...
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
Time synchronising is received from responsible Trimble GPS receiver (Hydrins 1 is receiving data from Trimble 1, Hydrins 2 from Trimble 2).
Geographical ship's position is received from responsible Trimble GPS receiver (Hydrins 1 is receiving data from Trimble 1, Hydrins 2 from Trimble 2). Positions provided by Hydrins 1 and Hydrins 2 are both centered to Hydrins 1. | ||
Rawdata storage on board
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
Data storage in DShip system.
| ||
Dship
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
Unevaluated measurement data. | ||
| Metadata list |
|---|
|| Device name | hydrins ||
|| Parameters | course \[deg\]; gyro heading \[deg\]; gyro heading ang. rate \[°/s\]; gyro pitch \[deg\]; gyro pitch ang. rate \[°/s\]; heave \[m\]; position latitude \[°\]; position longitude \[°\]; speed \[kn\]; x-velocity \[m/s\]; y-velocity \[m/s\]; z-velocity \[m/s\] || |
Data archiving on land
| Metadata (Metadata Plugin) | ||||
|---|---|---|---|---|
| After the cruise the DShip data set can be extracted from https://dms.awi.de.
Quality checked positions are published as "Master Track" in PANGAEA https://www.pangaea.de/ (for authorized users only).||||
| Metadata list |
|---|
Documentation
| Sensorweb integration | ||||
|---|---|---|---|---|
| ||||
...