...
| Note | ||
|---|---|---|
| ||
Please note that operations of the Sediment Echo Sounder Atlas Parasound P70 requires experienced scientific staff on board for permanent supervision of data aquisition and storage. The system is not operated by the ship's crew. Announce operations with the Sediment Echo Sounder Atlas Parasound P70 to AWI-Logistics prior to the cruise and clarify the data transfer after the cruise. |
Summary
| Sensorweb integration | ||||
|---|---|---|---|---|
| ||||
The Sediment Echo Sounder surveys the upper layers of the seafloor via the reflection of acoustic signals. Depending upon the reflectivity of the sediments penetration depths of about 200m can be reached. |
| Sensorweb integration | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||
|
| Sensorweb integration | ||||
|---|---|---|---|---|
| ||||
   |
Transducer FrequencyTransducer Frequency
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
High frequency: 19 - 38 kHz; Parametric signal: 0.5 - 6.0 kHz |
...
Contacts
| Sensorweb integration | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| |||||||||
|
Components
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
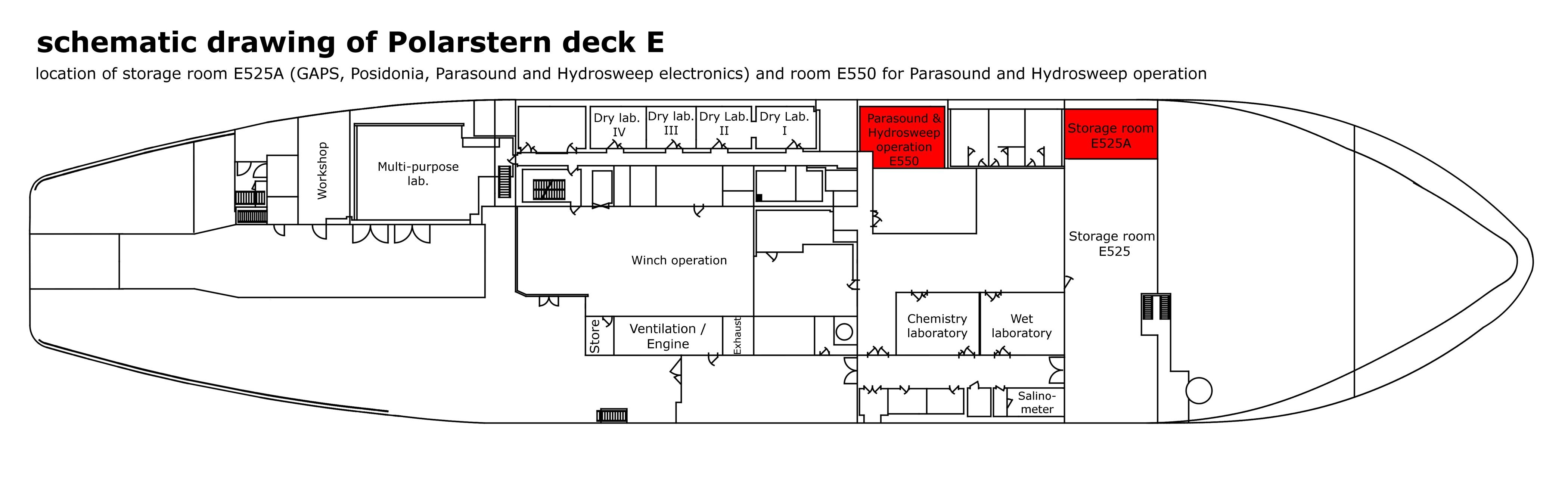
The system consits of the transducer, the electronic unit, two computers with installed data acquisition and processing software ParaStore and the subsidiary display on the bridge.
The transducer consists of four segments and is mounted without ice protection window in the box keel. The transducer transmits in the frequency range of 18 - 39 kHz and reaches water depth of 10 to 11000m. Frequency interferences generate "parametric low frequencies" between 0.5 and 6.0 kHz. Penetration depth into the sediment accounts for > 200m (depending on sediment properties) and the resolution is 6.1 cm. |

Position
| Sensorweb integration | ||||||||
|---|---|---|---|---|---|---|---|---|
| ||||||||
|
...
Data logging, storage and archiving
Logged parameters
| Sensorweb integration | ||||||
|---|---|---|---|---|---|---|
| ||||||
|
Central geographical ship's position and time standard
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
Time synchronising is carried out via NMEA-telegram from the ZDA data set or via ntp between DIP2 and the central ntp-server of the on-board network. DIP2 functions as ntp-server for the computers and residual DIPs of the Parasound System. |
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
The recorded geographical ship's position is the location of the central motion sensor MINS. The lever between transducer and the central motionsensor MINS is considered. |
Rawdata storage on board
| Metadata (Metadata Plugin) | ||||
|---|---|---|---|---|
| The data acquisition and processing software ParaStore creates rawdata on the local drive depending on system configuration. PHF = primary high frequency beam amplitudes, SLF = secondary low frequency beam amplitudes, SHF = secondary high frequency beam amplitudes. Synchonising of the local data directory to mass storage has to be carried out manually in the following data structure. A reduced set of uncorrected measurement data is stored to the DShip system.||||
| Metadata list |
|---|
Dship
| Metadata (Metadata Plugin) | ||||
|---|---|---|---|---|
| Reduced set of uncorrected measurement data||||
| Metadata list |
|---|
Data archiving on land
| space-metadata | ||
|---|---|---|
| ||
After the cruise, the operator transfers the measurement data along with required meta data to AWI after consultaion with the data scientist and AWI Logistics. Then, the data (including meta data) can be extracted from https://www.pangaea.de/ (for authorized users only). The reduced, unevaluated DShip data set can be extracted from https://dms.awi.de. |
| Metadata list |
|---|
|| File format(s) | ??? ||
|| Calibration certificates | ??? || |
Documentation
...
| Metadata list |
|---|
Documentation
| Sensorweb integration | ||||
|---|---|---|---|---|
| ||||