...
| Sensorweb integration |
|---|
| urn | vessel:heincke:gaps |
|---|
| contenttype | Metadata |
|---|
|
| Manufacturer | iXblue |
|---|
| Model | OIGAPS-Carbone, PN: 430 9000 |
|---|
| Serial No. | n/a097 |
|---|
| Type | ultra short baseline positioning systems |
|---|
| REGISTRY-Link | ↪ REGISTRY (2359) |
|---|
|
Transducer Frequency:
...
| Metadata (Metadata Plugin) |
|---|
|
|
Contacts
| Sensorweb integration |
|---|
| urn | vessel:heincke:gaps |
|---|
| contenttype | Contacts |
|---|
|
| Name | Institution | Role Name |
|---|
| Ralf Krocker | Alfred Wegener Institute, Helmholtz Centre for Polar and Marine Research | Engineer In Charge | Krocker, Ralf |
|
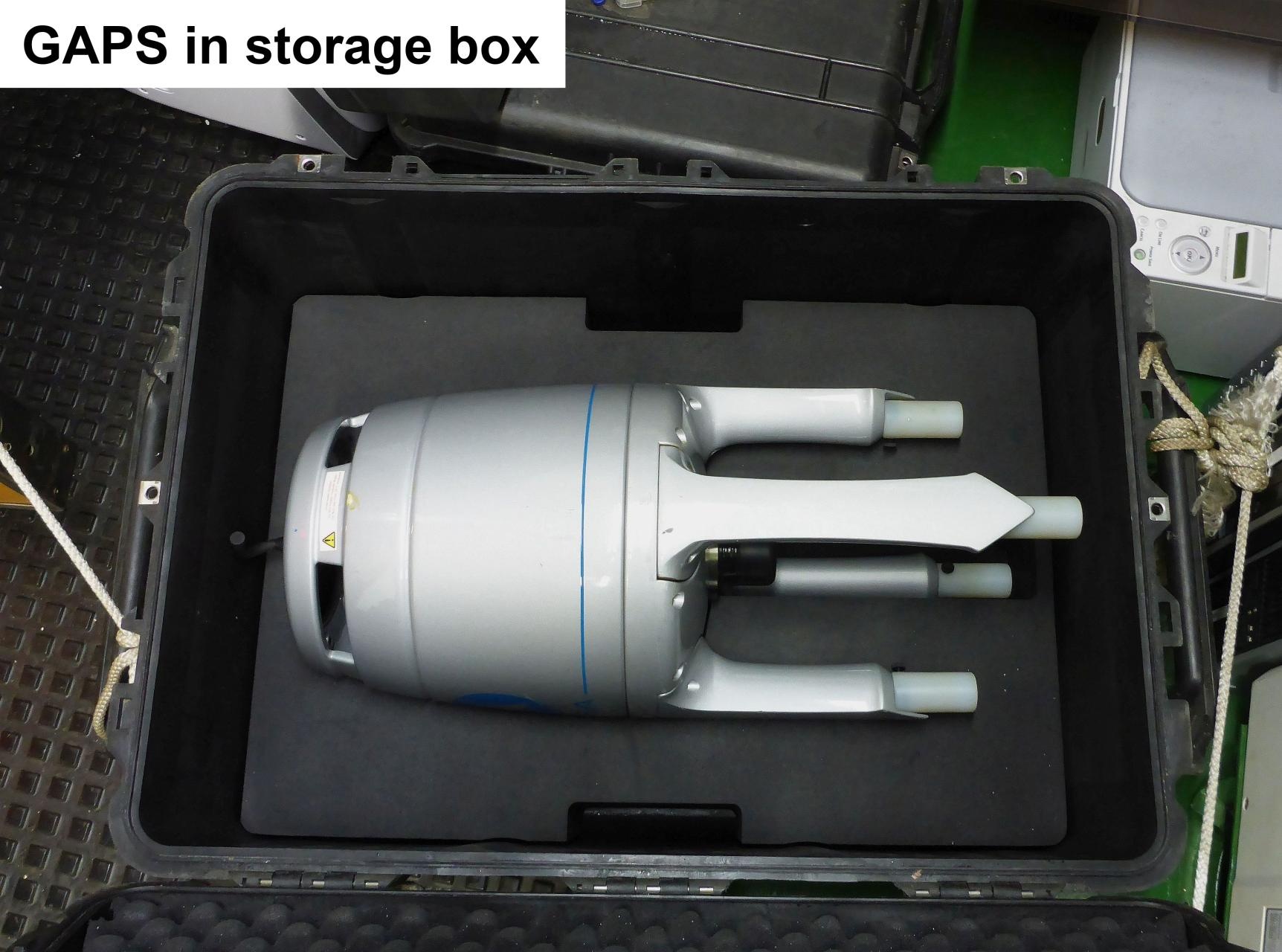
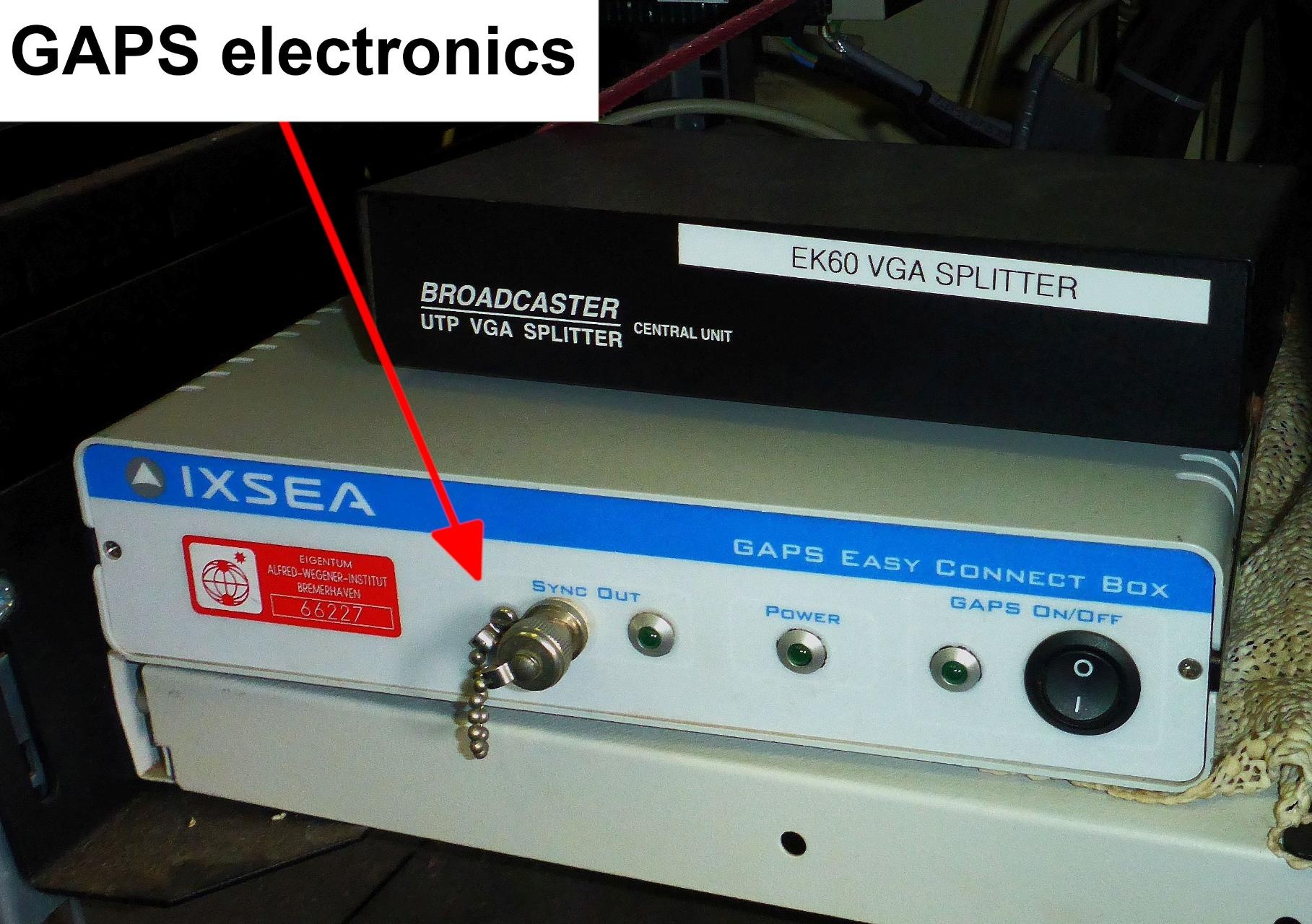
Components
The system consists of the GAPS antenna itself, mounting for installation at the ships bottom, the Easy Connect Box (ECB) and monitoring software "GAPS MMI - Man Machine Interface". The transponders can be mounted to winch wire or to a submarine vehicle or other submarine object.
...
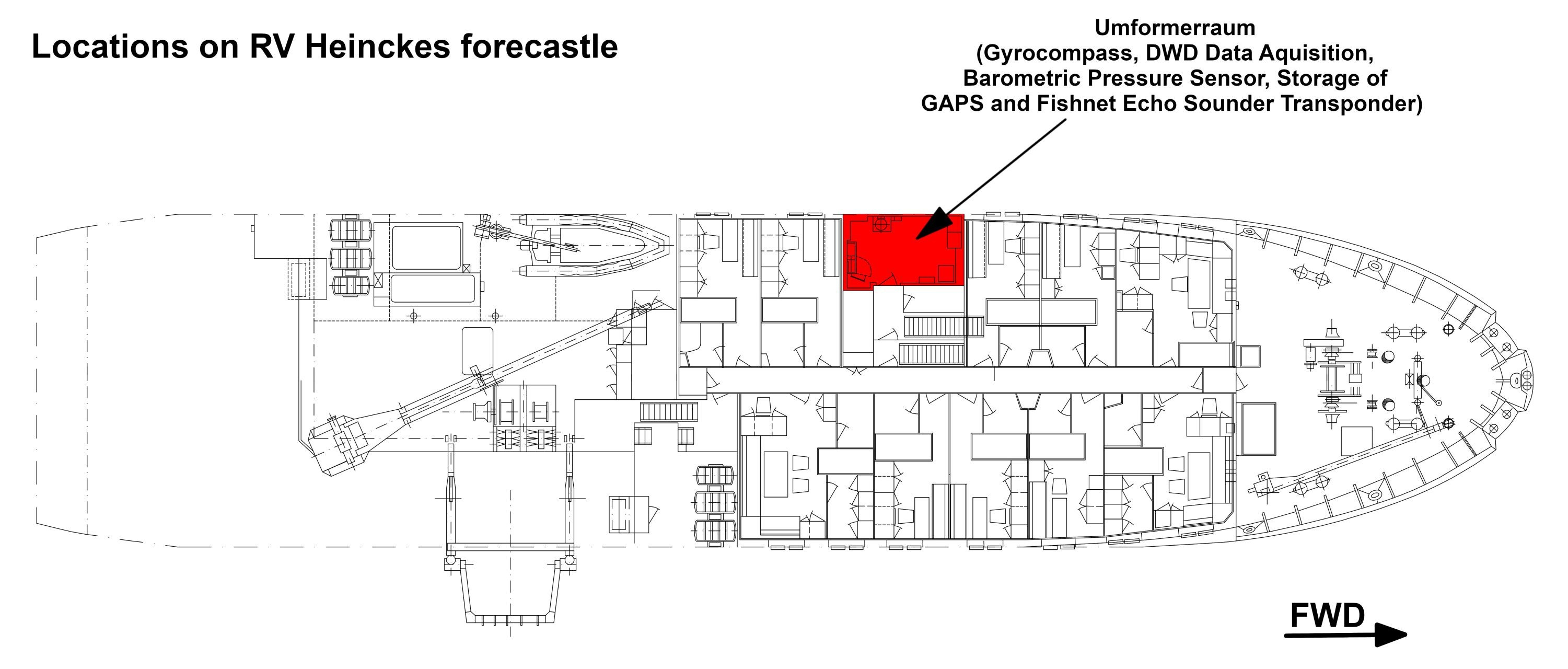
Two acoustic transponders (IXBLUE/Oceano MT832E-R and MT832E-HD-R) are available onboard RV Heincke. The transponders must mechanically be mechanically attached to underwater objects or vehicles. The transponders are synchronized to the GAPS and can be operated in transponder-mode (acoustic transmission and receiving) or in responder-mode (electric transmission and acoustic receiving; cables and plugs for responder-mode are not available on board). For transponder MT832E-R exists a winch cable mounting.
...
| Sensorweb integration |
|---|
| urn | vessel:heincke:gaps |
|---|
| contenttype | Subdevices |
|---|
|
|
Position
| Sensorweb integration |
|---|
| urn | vessel:heincke:gaps |
|---|
| contenttype | LocalFrame |
|---|
|
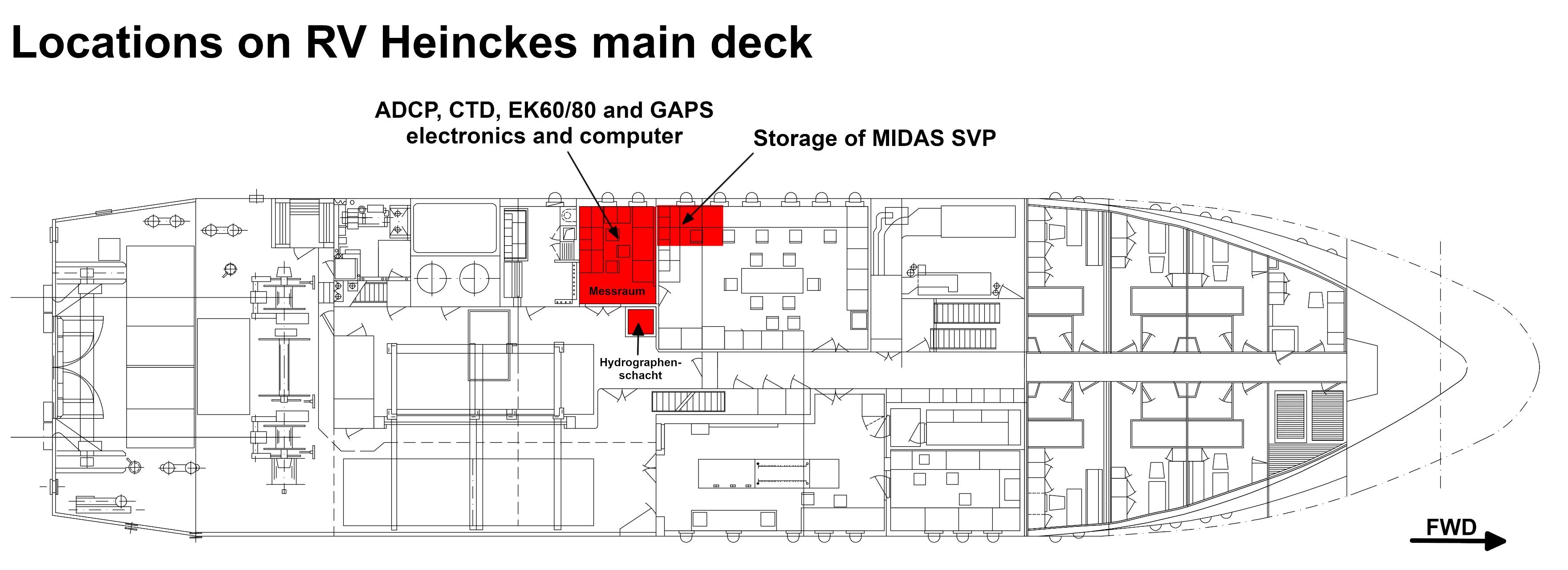
| Origin Description:Info | Electronics of the GAPS system are located in the server rack in the Mess- and Registrierraum and software is installed on the CTD-PC. The GAPS is deployed via the Hydrographenschacht. | | X | 0.0 (no unit given)
(no description given) | | Y | 0.0 (no unit given)
(no description given) | | Z | 0.0 (no unit given)
(no description given) |
|
Data logging, storage and archiving
Logged parameters
| Sensorweb integration |
|---|
| urn | vessel:heincke:gaps |
|---|
| contenttype | Parameters |
|---|
|
| Parameter | Sensor O2ARegistry Output Type | Units | MeasurementProperties Unit |
|---|
| heading | attitude | degreedeg | | latitude | latitude | degreedeg | | longitude | longitude | degreedeg | | altitude | attitude | m | | roll | attitude | degreedeg | | pitch | attitude | degreedeg | | transponder number | index | unknown | | x-coordinate | distance | m | | y-coordinate | distance | m | | z-coordinate | distance | m | | depth | depth | m | | month | date and time | unknown | | time in hours | date and time | unknown | | year | date and time | unknown | | day | date and time | unknown |
|
Central geographical ship's position and time standard
...
| Metadata (Metadata Plugin) |
|---|
|
|
Rawdata storage on board
Data storage in DShip system.
...
| Metadata (Metadata Plugin) |
|---|
|
|
DShip
| Metadata (Metadata Plugin) |
|---|
|
|
Data archiving on land
| Metadata (Metadata Plugin) |
|---|
|
Data archiving on land
...
Documentation
| Sensorweb integration |
|---|
| urn | vessel:heincke:gaps |
|---|
| contenttype | Resources |
|---|
|
- GAPS_datasheet , 479KB (Factsheet, 479 kB)
- GAPS Positioning System User Manual , 21MB (User Manual, 21 MB)
- GAPS Carbon V.1 User Guide , 12MB (User Manual, 12 MB)
- GAPS techical description , 4MB (Factsheet, 4 MB)
- GAPS technical drawing , 542KB (Factsheet(Factsheet, 542 kB)
- Inbetriebnahme GAPS auf FS Heincke - Kurzanleitung (User Manual, 839 kB)
|