...
| Note |
|---|
|
Please note that operations of the Fishing Echo Sounder Simrad EK 60 / EK 80 requires experienced scientific staff on board and can be only operated on request. The system is not operated by the ship's crew. Announce Request operations with the Fishing the Fishing Echo Sounder Simrad EK 60 / EK 80 to AWI-Logistics in sufficient time prior to the cruise and clarify the data transfer after the cruise. Data quality of Fishing Echo Sounder Simrad EK 60 / EK 80 is decreased by operating other Echo Sounders. Repeatable disturbances wered were detected from simultaneously operating a) POSIDONIA, b) Deep Water Sounder Simrad EA 500 DWS, c) Sonar Doppler Speed Log DOLOG and dc) Sediment Echo Sounder Parasound P70. Switch off these Echo Sounders for high data quality. |
Summary
| Sensorweb integration |
|---|
| urn | vessel:polarstern:simrad_ek80_ps |
|---|
| contenttype | Summary |
|---|
|
The sounder operates several frequencies simultaneously thus allowing to detect fish in different depths. |
| Sensorweb integration |
|---|
| urn | vessel:polarstern:simrad_ek80_ps |
|---|
| contenttype | Metadata |
|---|
|
| Manufacturer | Kongsberg |
|---|
| Model | Simrad EK 80 |
|---|
| Serial No. | n/a |
|---|
| Type | echo sounder |
|---|
| REGISTRY-Link | ↪ REGISTRY (8406) |
|---|
|
| Sensorweb integration |
|---|
| urn | vessel:polarstern:simrad_ek80_ps |
|---|
| contenttype | Images |
|---|
|
 Image Added Image Added  Image Added Image Added 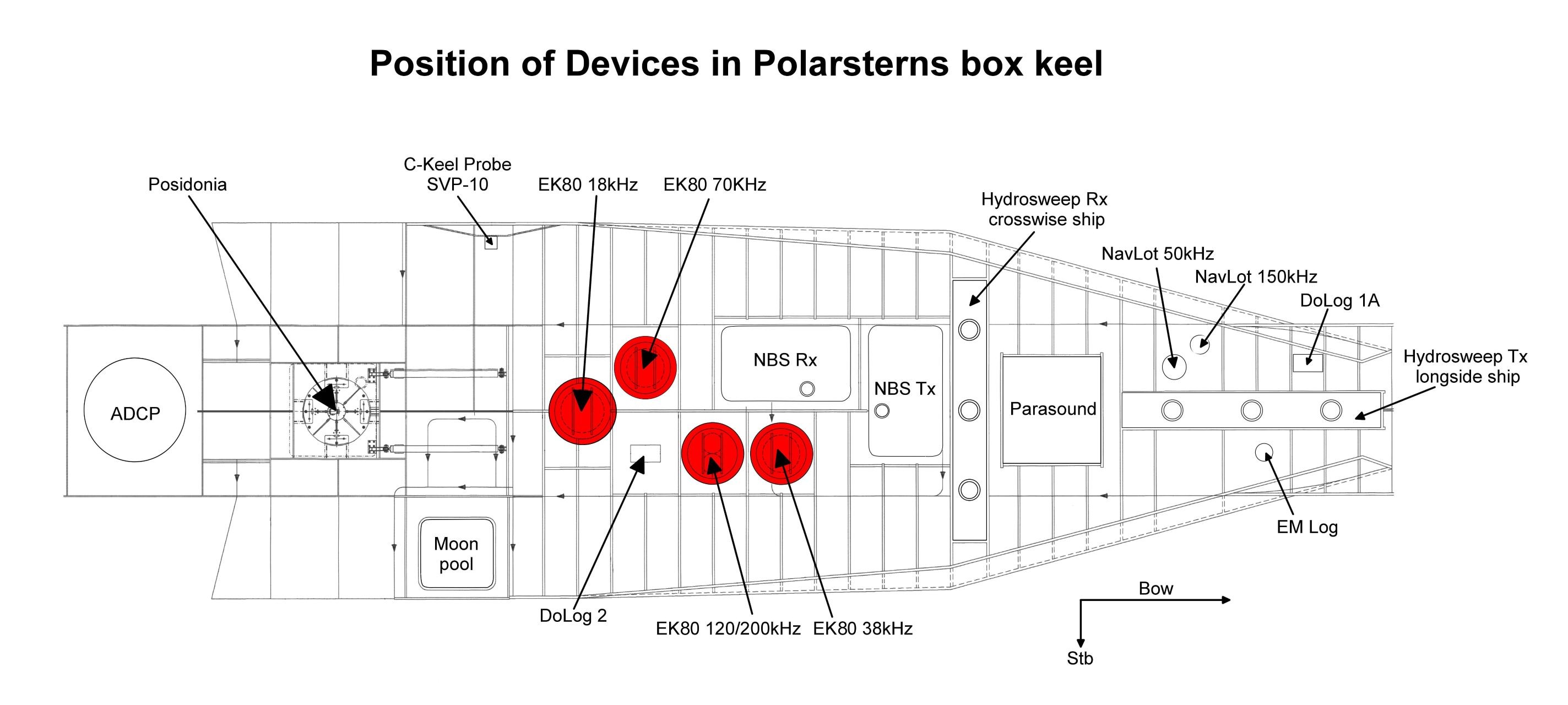 Image Added Image Added |
Transducer Frequency:
| Metadata (Metadata Plugin) |
|---|
|
18, 38, 70, 120, 200 kHz |
...
Contacts
| Sensorweb integration |
|---|
| urn | vessel:polarstern:simrad_ek80_ps |
|---|
| contenttype | Contacts |
|---|
|
| Name | Institution | Role |
|---|
| Sören Krägefsky | Alfred Wegener Institute, Helmholtz Centre for Polar and Marine Research | Engineer In Charge, Principal Investigator, Data Scientist | | Alfred Wegener Institute for Polar and Marine Research | Alfred Wegener Institute, Helmholtz Centre for Polar and Marine Research | Owner |
|
Components
| Metadata (Metadata Plugin) |
|---|
|
The system consits of five "split beam" transducers (ES-18, ES-38B, ES-70C, ES-120C, ES-200C) located in the box keel, five General Purpose Transceivers (GPTs) in Geräteraum and a computer with data acquisition and processing software installed in wissenschaftlichen Arbeitsraum. |
...
38 kHz
...
70 kHz
...
120 und 200 kHz
...
 Image Removed
Image Removed
...
 Image Removed
Image Removed
...
 Image Removed
Image Removed
Subdevices
Position
Data logging, storage and archiving
| Metadata (Metadata Plugin) |
|---|
|
Measurement data are stored in the local data volume and in the DShip-System on board.
After the cruise, the operator must transfer the measurement data to AWI via central AWI-data-transfer, where required meta data are added for data archiving and further processing. |
Subdevices
| Sensorweb integration |
|---|
| urn | vessel:polarstern:simrad_ek80_ps |
|---|
| contenttype | Subdevices |
|---|
|
|
Position
| Sensorweb integration |
|---|
| urn | vessel:polarstern:simrad_ek80_ps |
|---|
| contenttype | LocalFrame |
|---|
|
| Info | xyz-position calculated from Alignment Survey Report RV Polarstern (2016), transducers located in box keel, electronics located in E525, computers located in A113 | | X | 73.14 m
(X-0 is at the center of der rudder (ref. design drawing of the vessel), positive X-axis is forward and along vessel centerline) | | Y | 0.022 m
(Y-0 at centerline, positive Y-axis is portside ) | | Z | 0.012 m
(Z-0 is set to the lowest point of the keel, positive Z-axis is upwards) |
|
Data logging, storage and archiving
Logged parameters
| Sensorweb integration |
|---|
| urn | vessel:polarstern:simrad_ek80_ps |
|---|
| contenttype | Parameters |
|---|
|
| Parameter | O2ARegistry Output Type | Unit |
|---|
| depth | depth | m |
|
...
Central geographical ship's position and time standard
| Metadata (Metadata Plugin) |
|---|
| Time synchronising of the computers is regulated via the affiliation to the Windows domain. Additionally, the NMEA-String ZDA is stored in the data files.
|
Rawdata storage on board
| Metadata (Metadata Plugin) |
|---|
|
The geographical ship's position is transferred to the Master PC together with the NMEA-String and to the data files.
There is no centering of the GPS Position to the transducers. |
Rawdata storage on board
...
*Rohdaten an Bord:* Die herstellerspezifische Datenerfassungs\- und Verarbeitungs-Software ER60 erzeugt Rohdaten mit folgender Dateistruktur: || Stammverzeichnis || Verzeichnisname || Dateiname || | \\polsrv1\data01\fishsounder\ | Reisenummer | Dateipräfix-Dyyyymmdd-Thhmmss.raw | mit yyyy = Jahr; mm = Monat; dd = Tag; hh = Stunde; mm = Minute; ss = Sekunde. so z.B.: || Stammverzeichnis || Verzeichnisname || Dateiname || | \\polsrv1\data01\fishsounder\ | ANT25-3\ | ANT25_3-D20090113-T144735.raw | | | | ANT25_3-D20090113-T145849.raw| Dabei belegt die Dateistruktur das folgende Volumen: {metadata-list}|| Volumen (MB pro Tag) ca. | 3500 || || Anzahl Dateien pro Tag ca. | 100 ||{metadata-list} *Rohdaten an Land:* Je nach Absprache mit der AWI-Logistik und mit dem oben genannten Geräteverantwortlichen besteht die Möglichkeit die gewonnenen Rohdaten, nachdem sie mit Metadaten versehen worden sind, über [PANGAEA|http://www.pangaea.de/search?l&q=polarstern] zur Verfügung zu stellen.
Dship
| Metadata (Metadata Plugin) |
|---|
|
|
Data archiving on land
| Metadata (Metadata Plugin) |
|---|
|
|
Calibration
The EK80 system must be calibrated. Ideally, the calibration is executed before and after the measurement in the working area. So, the calibration parameters can be defined dependent the actual water conditions. For this reason a calibration on previous cruises will not lead to optimal results.
The calibration is performed using three winch systems positioning the calibration sphere below the transducers.
The winch system as well as their control must operated by the scientists. The laboratory electronic engineer may assist the setup of the system.
A calibration must be planned like all other scrientific work prior the cruise, because the calibration work needs time. Ideally half a day is requested, but will take longer (may be a whole day), if weather conditions decrease.
Ideally the calibration is performed in calm sea without wind. If wind forces the drift of the ship, the winches will not hang vertical anymore but will also drift. Under this conditions it is very difficult, to move the calibration sphere to the requested locations.
Furthermore, the calibration must be planned, because calibration equipment is not permanently on board. The winches etc. need storage capacities and are stored during harbour visit in Bremerhaven, only.
If you are planning to execute a calibration, please add the that work in formula "Einsatzplanung" and step in contact with schiffskoord@awi.de for further planning.
Documentation
| Sensorweb integration |
|---|
| urn | vessel:polarstern:simrad_ek80_ps |
|---|
| contenttype | Resources |
|---|
|
|
| Metadata (Metadata Plugin) |
|---|
|
The data acquisition and processing software VmDas creates rawdata on the local drive of the computer.
Every hour the software Easy2Sync copies the data to a local backup file structure.
Every 3 hours the software Easy2Sync synchronizes the backup data to the directory structure of the mass storage.
Attention: Deleting files in the directory structure of the mass storage will also delete these files in the backup file structure with the next synchronization run. But: As long as these files are not removed from the local rawdata drive these files will be copied again to the local backup file structure with the next backup run and to the directory structure of the mass storage with the next synchronization run. |
| Metadata list |
|---|
|| root directory | C:\ADCPData\ \\ or \\ C:\ADCPDataBackup\ \\ or \\ \\polsrv1\data01\ADCP\... || directory name | CruiseNo \ \\ e.g. \\ ANT25_3\ || file name | CruiseNoVVV_RRRRRR.ENR \\ CruiseNoVVV_RRRRRR.ENS \\ CruiseNoVVV_RRRRRR.ENX \\ CruiseNoVVV_RRRRRR.LTA \\ CruiseNoVVV_RRRRRR.N1R \\ CruiseNoVVV_RRRRRR.NMS \\ CruiseNoVVV_RRRRRR.STA \\ CruiseNoVVV_RRRRRR.LOG \\ CruiseNoVVV_RRRRRR.VMO \\ with: \\ VVV = version No. \\ RRRRRR = running No. \\ e.g. \\ ANT25_3012_000000.ENR\\ ANT25_3012_000000.N1R \\ ANT25_3012_000000.LOG \\ ... \\ ANT25_3012_000001.ENR\\ ANT25_3012_000001.N1R \\ ANT25_3012_000001.LOG \\ ... || |
| Metadata list |
|---|
|| Data volume (MB per day) ca | 350 ||
|| Number of files per day ca | 35 || |
Dship
| Metadata (Metadata Plugin) |
|---|
|
Es werden keine Daten an das DShip-System übergeben. |
Data archiving on land
| Metadata (Metadata Plugin) |
|---|
|
After the cruise the operator transfers the complete measurement data to AWI via central AWI-data-transfer. Then, the data (including meta data) can be extracted from https://www.pangaea.de/ (for authorized users only). The reduced, unevaluated DShip data set can be extracted from https://dms.awi.de. |
PANGAEA Directory structure:
...
/<_PANGAEA-Dir_>/ADCP/<_CruiseNo_>/
| Metadata list |
|---|
|| File format(s) | See: Handbuch VmDas Quick Start Guide ||
|| Calibration certificates | NO || |
Documentation
External Manuals
...