| Note | ||
|---|---|---|
| ||
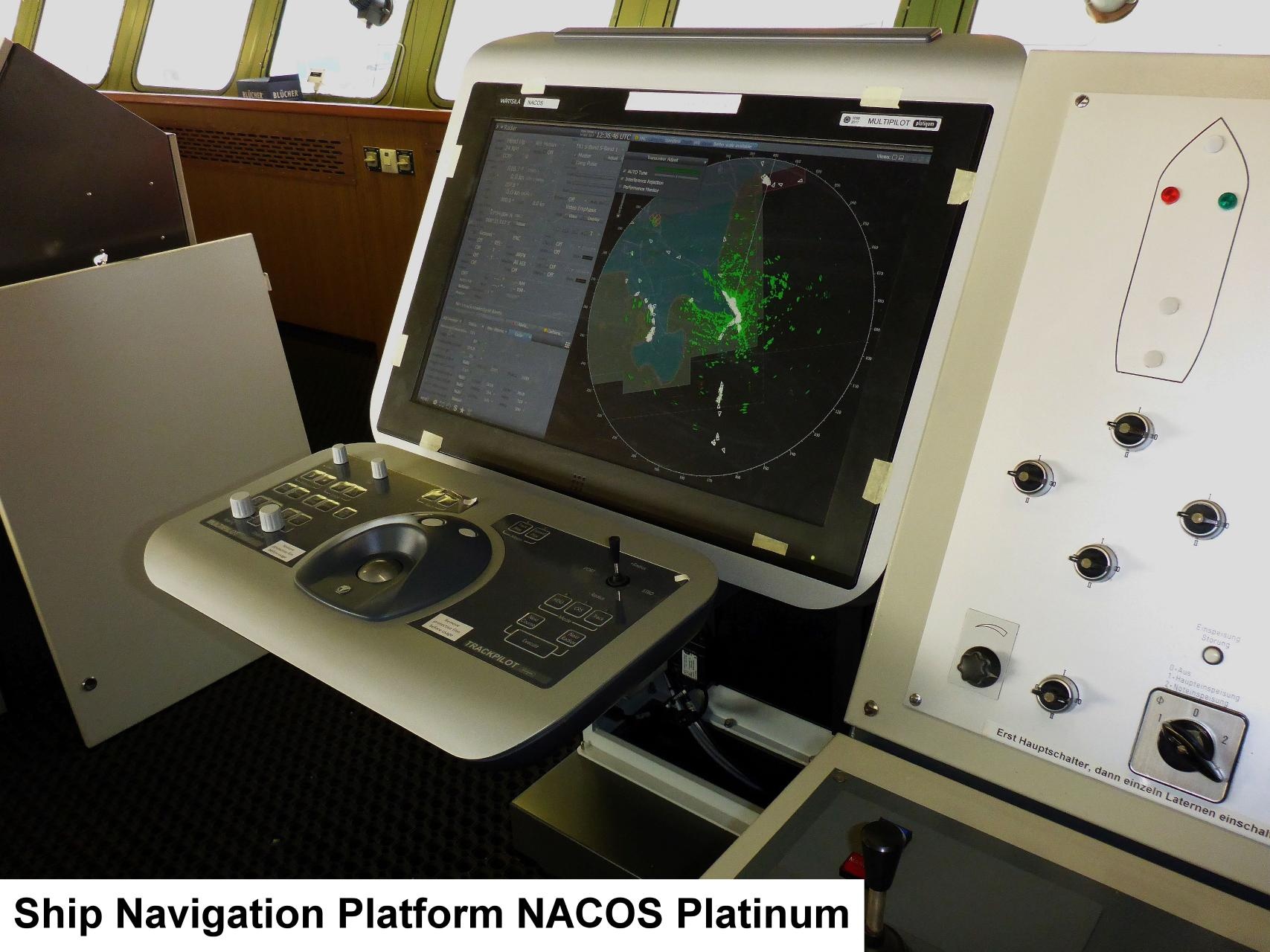
The Ship Navigation Platform (NACOS) is operated by ship's command only. |
Summary
| Sensorweb integration | ||||
|---|---|---|---|---|
| ||||
The NACOS ship navigation system is the main software platform for all processes concerning navigation and ship maneuvers. |
| Sensorweb integration | ||||||||
|---|---|---|---|---|---|---|---|---|
| ||||||||
|
| Sensorweb integration | ||||
|---|---|---|---|---|
| ||||
 |
Contacts
| Sensorweb integration | ||||||
|---|---|---|---|---|---|---|
| ||||||
|
Components
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
NACOS Platform includes Radar, Autopilot and Track Control, Conning and Docking display, VDR and a full navigation sensor package, joystick system, alarm, monitoring and control system, power management system, propulsion control system, main engine safety system, 2-stroke engine governor system, HVAC and cargo monitoring, ship-to-shore data link, remote monitoring and remote maintenance solutions. Multi-function workstation displays on the bridge provide access to all applications installed. |
Position
| Sensorweb integration | ||||
|---|---|---|---|---|
| ||||
|
Data logging, storage and archiving
Logged parameters
| Sensorweb integration | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Central geographical ship's position and time standard
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
Time synchronising via DShip. |
Rawdata storage on board
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
Data storage in DShip system. |
Dship
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
Uncorrected measurement data. |
| Metadata list |
|---|
|| Device name | NACOS ship navigation system || || Parameters| EW; identifier; message mode; message number; NS; route Id; speed bottom track across \[kn\]; speed bottom track ahead \[kn\]; speed made good \[kn\]; speed watertrack across \[kn\]; speed watertrack ahead \[kn\]; system course \[deg\]; system course status; system heading \[deg\]; system heading status; system position latitude \[°\]; system position longitude \[°\]; system position status; system speed \[kn\]; system speed status; system speed \[kn\]; system speed status; system speed unit; track made good \[deg\]; track speed status; waypoint Id From; waypoint Id To; waypoint position EW; waypoint position longitude \[°\]; waypoint position NS; waypoint position latitude \[°\] || |
Data archiving on land
| Metadata (Metadata Plugin) | ||
|---|---|---|
| ||
After the cruise the DShip data set can be extracted from https://dms.awi.de. |
| Metadata list |
|---|
|| File format(s) | *.txt || || Calibration certificates | NO || |
Documentation
| Sensorweb integration | ||||
|---|---|---|---|---|
| ||||