...
| Sensorweb integration |
|---|
| urn | vessel:heincke:em_log |
|---|
| contenttype | Summary |
|---|
|
| The electromagnetic log measures the speed of the vessel through water. |
| Sensorweb integration |
|---|
| urn | vessel:heincke:em_log |
|---|
| contenttype | Metadata |
|---|
|
| Manufacturer | Sperry Marine |
|---|
| Model | NAVIKNOT 350E |
|---|
| Serial No. | n/a |
|---|
| Type | speed log |
|---|
|
|
| Sensorweb integration |
|---|
| urn | vessel:heincke:em_log |
|---|
| contenttype | Images |
|---|
|
 Image Removed Image Removed 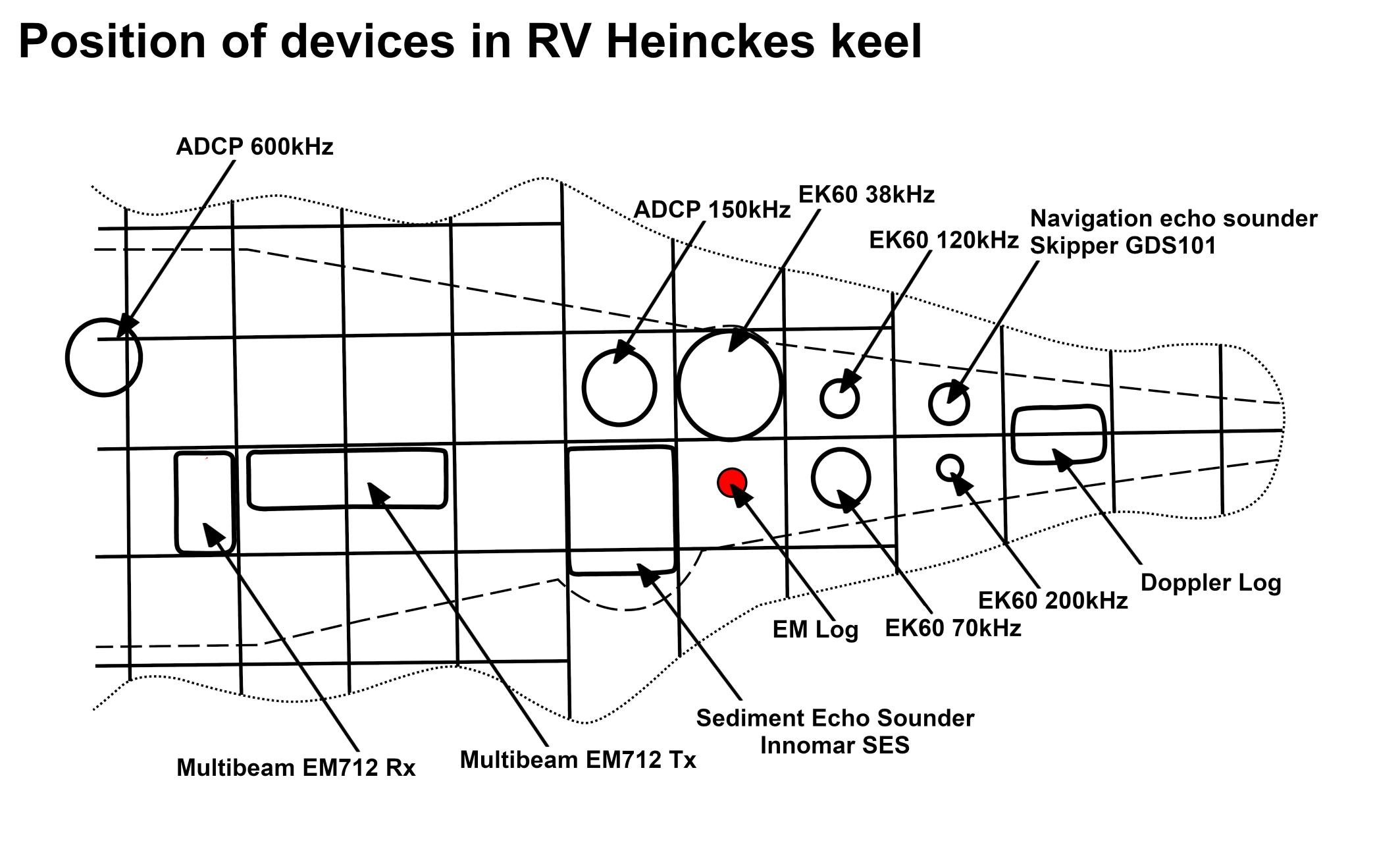 Image Removed Image Removed |
Contacts
| Sensorweb integration |
|---|
| urn | vessel:heincke:em_log |
|---|
| contenttype | Contacts |
|---|
|
| Name | Institution | Role |
|---|
| Reederei Briese | Reederei Briese | Engineer In Charge |
|
|
Components
The system consists of the EM Log transducer located in the keel and an operational unit on the bridge deck.
| Sensorweb integration |
|---|
| urn | vessel:heincke:em_log |
|---|
| contenttype | Subdevices |
|---|
|
| No subdevices found for this sensor. |
Position
| Sensorweb integration |
|---|
| urn | vessel:heincke:em_log |
|---|
| contenttype | LocalFrame |
|---|
|
| Origin Description: | xyz-position of transducer from Alignment Survey Report RV Heincke (January 2016). Electronics and operation on bridge deck. | | X: | 45.564 m
(Positive X axis is forward and along the centerline of the vessel with X0 at the Stern point of the vessel.) | | Y: | 0.25 m
(Positive Y axis is portside of centerline with Y0 at centerline at the Very stern point of the vessel.) | | Z: | 0.087 m
(Positive Z axis is upwards of basis. Z0 is set to the hydrophone on midship.) |
|
|
Data logging, storage and archiving
...
| Sensorweb integration |
|---|
| urn | vessel:heincke:em_log |
|---|
| contenttype | Parameters |
|---|
|
| Parameter | Sensor Output Type | Unit |
|---|
|
| longitudinal water speed | speed | knots |
longitudinal ground speed | speed | knots
Central geographical ship's position and time standard
...
| Sensorweb integration |
|---|
| urn | vessel:heincke:em_log |
|---|
| contenttype | Resources |
|---|
|
|